|
|
||
|---|---|---|
| .ipynb_checkpoints | ||
| img | ||
| mpc_pybullet_demo | ||
| notebooks | ||
| .DS_Store | ||
| .gitignore | ||
| README.md | ||
| requirements.txt | ||
README.md
mpc_python
Python implementation of a mpc controller for path tracking using CVXPY.
About
The MPC is a model predictive path following controller which does follow a predefined reference by solving an optimization problem. The resulting optimization problem is shown in the following equation:

The terns of the cost function are the sum of the cross-track error, heading error, velocity error and actuaction effort.
Where R,P,K,Q are the cost matrices used to tune the response.
The vehicle model is described by the bicycle kinematics model using the state space matrices A and B:
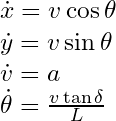
The state variables (x) of the model are:
- x coordinate of the robot
- y coordinate of the robot
- v velocuty of the robot
- theta heading of the robot
The inputs (u) of the model are:
- a linear acceleration of the robot
- delta steering angle of the robot
Demo
The MPC implementation is tested using bullet physics simulator. Racing car model is from: https://github.com/erwincoumans/pybullet_robots.
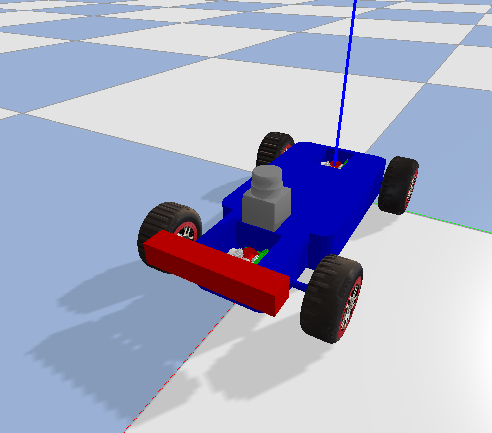
Results:
To run the pybullet demo:
python3 mpc_demo/mpc_demo_pybullet.py
To run the simulation-less demo:
python3 mpc_demo/mpc_demo_pybullet.py
Requirements
pip3 install --user --requirement requirements.txt