4.8 KiB
使用
准备
- 连接相机的数据线与电源线
- 相机亮起指示灯(绿色说明数据线连接正确,红色说明数据线与电源线均连接正确)
- 指示灯亮起代表相机功能正常,可开始使用
测试
进入桌面 测试 - > pico 深度相机测试
启动驱动
步骤:
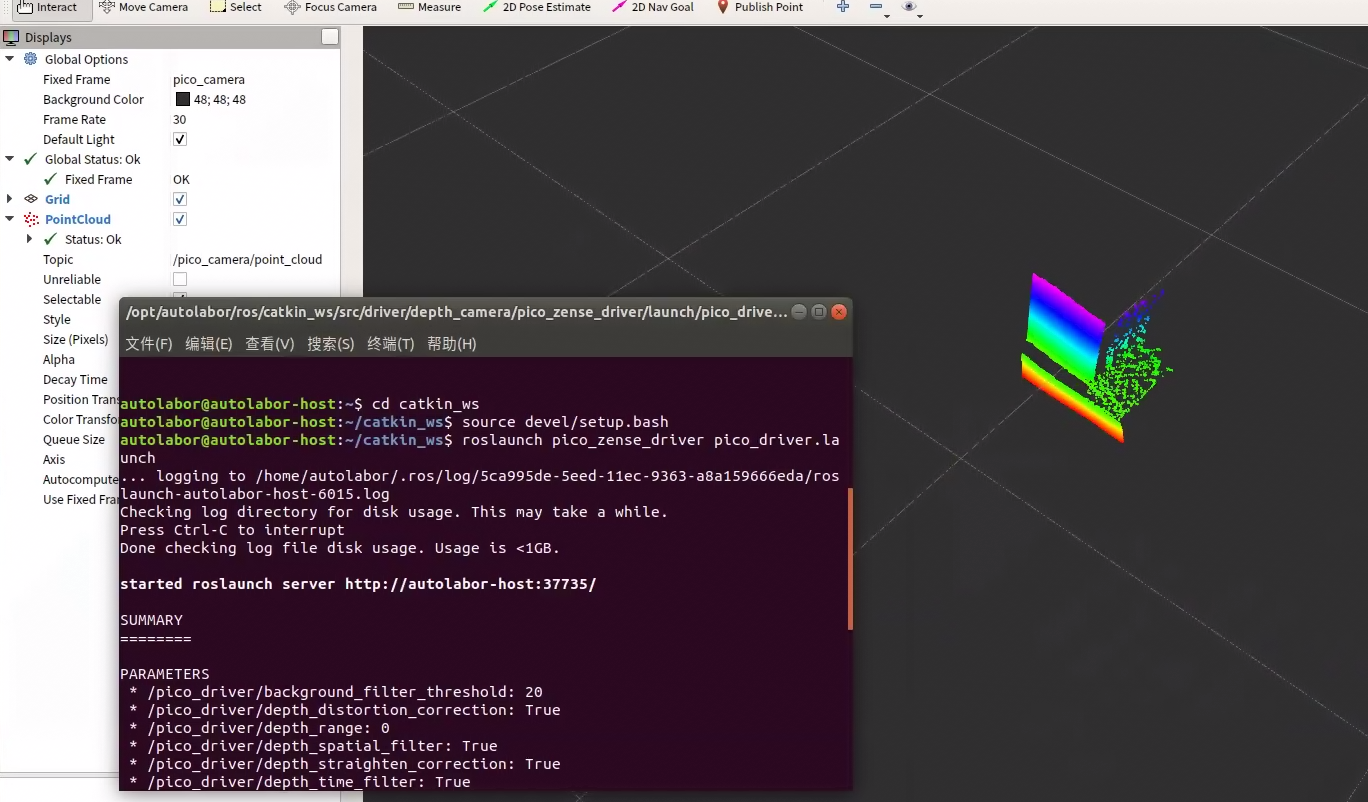
1.进入工作空间,打开终端执行
cd catkin_ws
2.配置环境变量,在终端执行
source devel/setup.bash
3.启动驱动,在终端执行
roslaunch pico_zense_driver pico_driver.launch
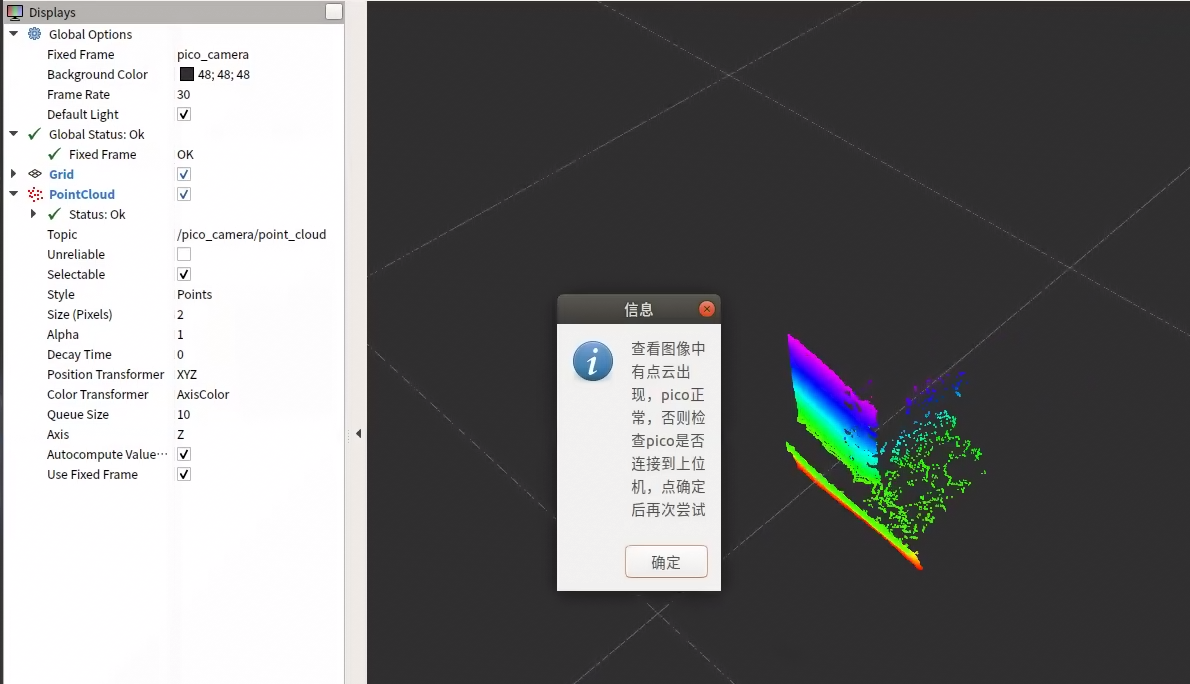
4.打开终端,执行 rviz ,打开RViz,可看到相机的点云数据
 注:相机数据加载需要几秒钟
注:相机数据加载需要几秒钟
ROS驱动包(ROS Driver Package)
注:OS系统中使用的Vzense相机ROS驱动包是Autolabor根据相机厂家提供的SDK开发的,非相机厂家提供。
发布的话题
/pico_camera/depth_image (sensor_msgs/Image) 深度图像
/pico_camera/color_image(sensor_msgs/Image)
rgb图像
/pico_camera/point_cloud(sensor_msgs/PointCloud)
点云
参数
| 参数 | 名称 | 备注 |
|---|---|---|
| ~namespace (str, default: pico_camera) | 命名空间 | 多个同一传感器重命名 |
| ~frame_name (str, default: pico_camera) | frameId | |
| ~device_index (int, default: 0) | 设备索引 | |
| ~read_frame_interval (int, default: 100) | 输出时间间隔 | 单位:毫秒 |
| ~depth_range (int, default: 0) | 深度范围(参数:0/2/5) | 设置值越大看的越远 |
| ~background_filter_threshold (int, default: 20) | 滤波参数(最大100) | 设置值越大,去的点越多(噪音和非噪音都会被去掉) |
| ~skip_row (int, default: 0) | 每一行中跳过显示的点 | 如设置为1,则跳1个点选1个点显示,一行最多640个点 |
| ~skip_column (int, default: 0) | 每一列中跳过显示的点 | 如设置为1,则跳1个点选1个点显示,一列最多480个点 |
| ~output_depth_image (bool, default: false) | 输出深度图像 | 节约性能,默认不输出 |
| ~output_color_image (bool, default: false) | 输出rgb图像 | 节约性能,默认不输出 |
| ~output_point_cloud (bool, default: true) | 输出点云 | |
| ~depth_spatial_filter (bool, default: true) | 是否使用空间滤波 | |
| ~depth_time_filter (bool, default: true) | 是否使用时间滤波 | |
| ~depth_distortion_correction (bool, default: true) | 是否使用畸变矫正 | |
| ~depth_straighten_correction (bool, default: true) | 是否使用扭曲矫正 |
驱动示例
<launch>
<node name="pico_driver" pkg="pico_zense_driver" type="pico_zense_driver">
<param name="namespace" value="pico_camera"/>
<param name="frame_name" value="pico_camera"/>
<param name="device_index" value="0"/>
<param name="read_frame_interval" value="100"/>
<param name="depth_range" value="0"/>
<param name="background_filter_threshold" value="20"/>
<param name="skip_row" value="2"/>
<param name="skip_column" value="2"/>
<param name="output_depth_image" value="false"/>
<param name="output_color_image" value="false"/>
<param name="output_point_cloud" value="true"/>
<param name="depth_spatial_filter" value="true"/>
<param name="depth_time_filter" value="true"/>
<param name="depth_distortion_correction" value="true"/>
<param name="depth_straighten_correction" value="true"/>
</node>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find pico_zense_driver)/rviz/display.rviz"/>
</launch>
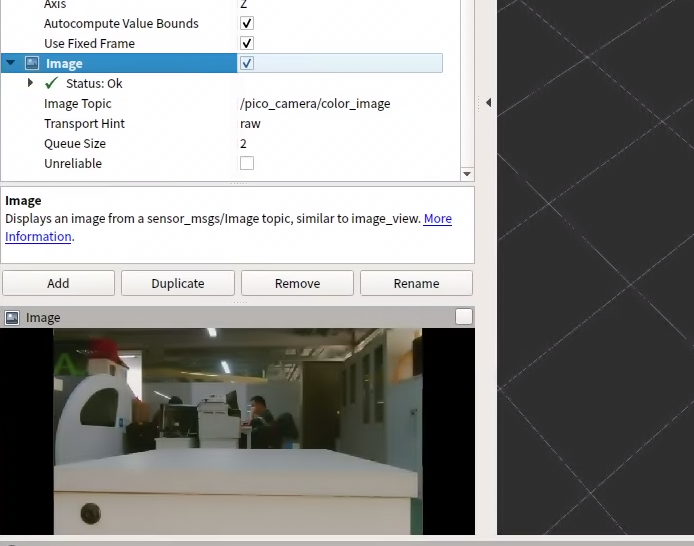
查看rbg图像
1.找到相机驱动launch文件,修改参数
catkin_ws\src\driver\depth_camera\pico_zense_driver\launch\pico_driver.launch
2.选择文件右键编辑,将 output_color_image 改为 true
3.保存并关闭文件
4.进入工作空间,打开终端执行
cd catkin_ws
5.配置环境变量,在终端执行
source devel/setup.bash
6.启动驱动,在终端执行
roslaunch pico_zense_driver pico_driver.launch
7.打开终端,执行 rviz ,打开RViz
8.添加图像话题,点击左下角 add,选择 /pico_camera->color_image ,保存