|
|
||
|---|---|---|
| .ipynb_checkpoints | ||
| .old/tracking | ||
| img | ||
| mpc_demo | ||
| notebooks | ||
| .gitignore | ||
| README.md | ||
| racecar.py | ||
| requirements.txt | ||
README.md
mpc_python
Python implementation of a mpc controller for path tracking using CVXPY.
About
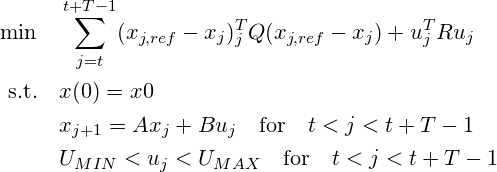
The MPC is a model predictive path following controller which does follow a predefined reference path Xref and Yref by solving an optimization problem. The resulting optimization problem is shown in the following equation:
The vehicle dynamics are described by the differential drive model:

The state variables of the model are:
- x coordinate of the robot
- y coordinate of the robot
- theta heading of the robot
The inputs of the model are:
- v linear velocity of the robot
- w angular velocity of the robot
Demo
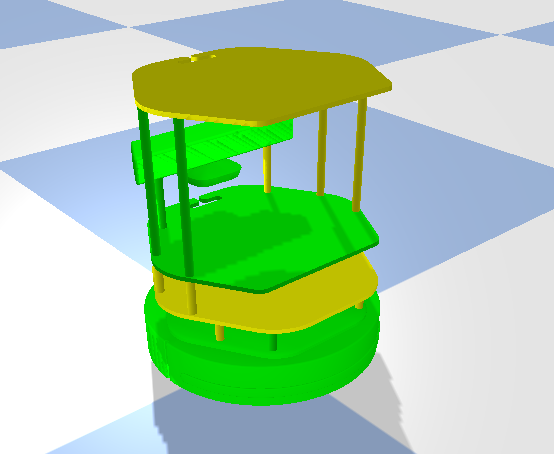
The MPC implementation is tested using bullet physics simulator. Turtlebot model is from: https://github.com/erwincoumans/pybullet_robots.
Results:
To run the pybullet demo:
python3 mpc_demo/mpc_demo_pybullet.py
To run the simulation-less demo:
python3 mpc_demo/mpc_demo_pybullet.py
Requirements
pip3 install --user --requirement requirements.txt