3.6 KiB
RTK循迹模块使用说明
开发引导
实现RTK定位功能的软件包含两部分 RTK RAW 驱动和 RTK ROS包
位于src/driver/location/al_rtk_ros_driver
RTK RAW驱动
raw 驱动部分包含从串口获取RTK的数据进行解析 ,并包含支持千寻服务的nrtip client。 可通过配置账号和密码直接获得Fixed解的位置, 其输出格式为WGS84坐标。
RTK ROS包
ROS驱动包除实现与ROS的接口外,实现了WGS84坐标系到ENU坐标的转换。ENU的直角坐标可直接被路径规划等算法使用。由于ENU坐标需要参考原点,此软件包会根据设置在第一次获得Fixed解时将当前坐标作为ENU坐标系x=0,y=0点。
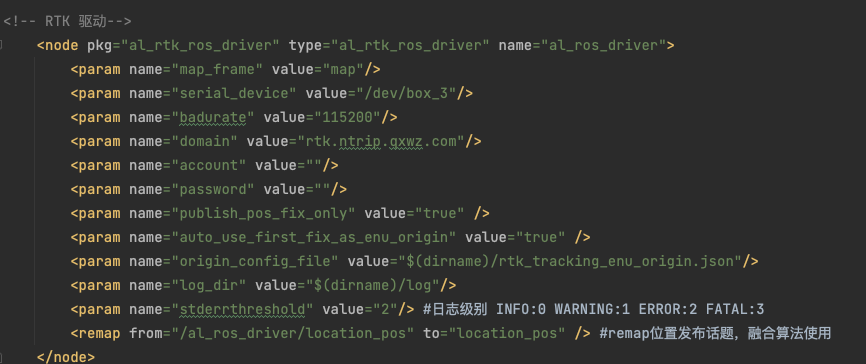
RTK 驱动的所有功能都通过launch文件中的 rtk node 节点进行配置 具体功能如下
-
map_frame 定义发布位置的坐标系,默认为map 无需修改
-
serival_device 计算机连接RTK接收机的串口地址,对于AP1套件已固定为/dev/box_3 对应USB hub#3接口。 如需在其他环境使用修改为对应串口地址即可
-
badurate 串口通讯速率 固定为115200 不能修改
-
domain 千寻ntrip 服务域名 无需修改
-
account 千寻ntrip 账号
-
password 千寻ntrip密码
-
publish_pos_fix_only 是否只在固定解情况下发布位置。 当设置为true时,尽在RTK接收机可以解算出固定解(即误差1-2cm的高精度位置)时发布位置话题的数据,如果无法获得固定解将不发布位置信息。设置为false将不考虑当前解的状态,可能输出误差10米左右的普通定位信息。
-
auto_use_first_fix_as_enu_origin 是否使用第一次收到的固定解位置作为ENU坐标系的原点。当设置为false时将不自动设置ENU坐标系原点,需要手动调用相应方法设置。默认为true,非必要无需修改
-
origin_config_file 保存enu原点WGS84坐标的文件,如果想清除已经设定的ENU坐标原点可手动编辑此文件或将其删除
-
log_dir LOG文件输出目录
-
stderrthreshold 日志输出级别,在调试过程中可将此级别设置为0 INFO,将输出驱动内部的详细工作信息。
AutolaborOS平台编译
由于Autolabor OS 已经包含了RTK所有需要使用的库,使编译工作变得极为简单,仅需要进入驱动目录,使用catkin 编译即可
可输入如下命令
cd ~/catkin_ws/src/driver/location/al_rtk_ros_driver/
catkin build --this
在编译前,强烈建议您清空已编译版本,并修改swap大小,进行一次完整的工作空间编译,以防止编译缓存造成的编译错误。
清空已编译的内容可通过如下命令实现
cd ~/catkin_ws
catkin clean -y
由于编译过程中需要使用大量的内存,通常物理内存不能满足要求,可能出现因为内存空间不足导致的编译失败。通常编译过程会通过使用swap空间的方式确保有足够的内存,我们已经提供了自动化修改swap空间的工具 您可通过 如下命令启动,并将swap空间设置15G以上通常可以满足编译的要求。
sudo ~/Tools/modifyswap.sh
进行整个工作空间的编译
cd ~/catkin_ws
catkin build
自行安装ROS编译
al_rtk_raw_driver 依赖于libevent ,编译前请确保已经安装。
在Ubuntu 18.04 可利用apt工具进行安装
sudo apt update
sudo apt install libevent-dev
al_rtk_ros_driver 所依赖的库都已在源代码目录包含,可直接在项目目录编译。
catkin build --this