922 B
922 B
简介
产品介绍
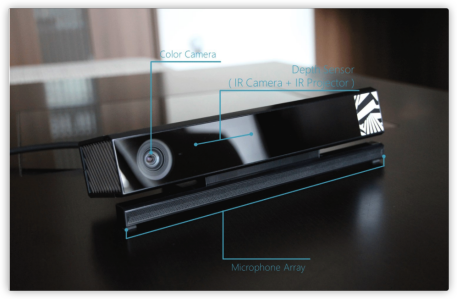
Kinect v2是微软发布的一款3D体感摄影机,是一种体感交互设备, 可以获取物体的深度信息,判断物体的位置,深度检测是Kinect的核心技术, Kinect v2的深度检测用的是TOF(Time Of Light)的方式: 通过红外摄像头投射红外线形成反射光,根据光线飞行时间判断物体位置,形成深度图像。
结构图

基本参数
| 项目 | 规格 |
|---|---|
| 尺寸 | 24.9cm x 6.6cm x 6.7cm |
| 彩色影像 | 1920 x 1080 @ 30 / 15 FPS(根据环境亮度) |
| 深度影像 | 512 x 424 @ 30 FPS、16bit 距离值(mm)、可侦测范围0.5 ~ 4.5 m |
| 红外线影像 | 512 x 424 @ 30 FPS、16bit 强度值 |
| FOV | 70°x 60° |