5.6 KiB
视觉SLAM
本文主要对SLAM技术进行介绍,叙述了VSLAM的框架及关键技术和方法,并总结了目前已有的VSLAM系统和相关资料。
目录
- SLAM技术介绍
- VSLAM系统及相关资料介绍
- SLAM框架
- SLAM的基本过程
- VSLAM的主要模块
1.SLAM技术介绍
SLAM,全称是Simultaneous Localization and Mapping,即同时定位与建图,指机器人在自身位置不确定的条件下,在完全未知环境中创建地图,同时利用地图进行自主定位和导航。因此可知SLAM的主要工作是定位以及建图。

目前SLAM有很多实现方法,根据使用传感器不同,主要分为:
(1)激光雷达传感器; (2)视觉传感器;
视觉SLAM(Visual SLAM 简称VSLAM)包括使用单目SLAM、双目SLAM和以Kinect为代表的深度摄像头的RGB-D SLAM。相比使用激光雷达传感器,视觉传感器的成本更低,因此也越来越受青睐。
目前SLAM被广泛应用于无人驾驶汽车、无人机、VR和AR等领域。
下面是宾大的教授kumar做的特别有名的一个demo,是在无人机上利用二维激光雷达做的SLAM。

2.VSLAM系统及相关资料介绍
目前在VSLAM领域实现较好的SLAM系统有:
- 单目、双目SLAM:
(1).PTAM(Parallel Tracking And Mapping):2007年很流行的SLAM项目,是第一个使用BA完成实时SLAM的系统。但其缺乏回环检测和重定位等功能,只能作用于小规模的场景,且稳定性也不是很高。(http://www.robots.ox.ac.uk/~gk/PTAM/)
(2).DTAM(Dense tracking and mapping in real-time):2011年,Direct SLAM方法的鼻祖;
(3).LSD-SLAM(Large-Scale Direct Monocular SLAM):2014年一个半稠密SLAM系统。(http://vision.in.tum.de/research/vslam/lsdslam)
(4).ORB-SLAM:2015年一个比较完整的基于特征点的SLAM系统。 (http://webdiis.unizar.es/~raulmur/orbslam/)
- RGB-D SLAM:
(1).KinectFusion 2011 (http://www.microsoft.com/en-us/research/project/kinectfusion-project-page/)
(2).RGBD-SLAM2 2014 (http://felixendres.github.io/rgbdslam_v2/)
(3).ElasticFusion 2015 (http://www.imperial.ac.uk/dyson-robotics-lab/downloads/elastic-fusion/)
当然除了上述项目的学习外,对于slam的学习入门,有一些经典教材如: Multiple View Geometry in Computer Vision (Second Edition) (http://www.robots.ox.ac.uk/~vgg/hzbook/)也有中文版为《计算机视觉中的多视图几何》。
Robotics Vision and Control(http://www.petercorke.com/RVC/) 本书是面向实践的,详细介绍了机器人和机器视觉。也有了中文版,叫做《机器人学、机器视觉与控制》。 此外,对于slam入门学习推荐高博的一起做RGB-D SLAM其博客为半闲居士(http://www.cnblogs.com/gaoxiang12/p/4633316.html)
3.SLAM框架
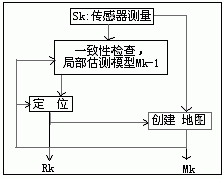
3.1 SLAM的基本过程
描述为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和传感器数据进行自身定位,同时建造增量式地图。
(1)定位(localization):机器人必须知道自己在环境中位置。
(2)建图(mapping):机器人必须记录环境中特征的位置(如果知道自己的位置)
(3)SLAM:机器人在定位的同时建立环境地图。其基本原理是运过概率统计的方法,通过多特征匹配来达到定位和减少定位误差的。
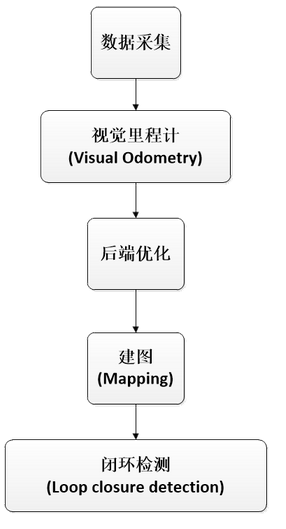
3.2 VSLAM的主要模块
视觉SLAM主要分为几个模块:数据采集、视觉里程计(Visual Odometry)、后端优化、建图(Mapping)、闭环检测(Loop closure detection)。如下图所示:
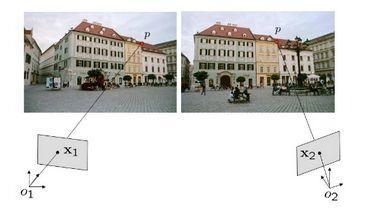
3.2.1 视觉里程计
视觉里程计是利用一个图像序列或者一个视频流,计算摄像机的方向和位置的过程。一般包括图像获取后、畸变校正、特征检测匹配或者直接匹配对应像素、通过对极几何原理估计相机的旋转矩阵和平移向量。
3.2.2 后端优化
理论上来说,如果视觉里程计模块估计的相机的旋转矩阵R和平移向量t都正确,就能得到完美的定位和建图了。但实际试验中,我们得到的数据往往有很多噪声,且由于传感器的精度、错误的匹配等,都对造成结果有误差。并且由于我们是只把新的一帧与前一个关键帧进行比较,当某一帧的结果有误差时,就会对后面的结果产生累计误差,导致误差越来越大。为了解决这个问题,引入后端优化。
后端优化一般采用捆集调整(BA)、卡尔曼滤波(EKF)、图优化等方式来解决。其中基于图优化的后端优化,效果最好。Graph-based SLAM一般使用g2o求解器,进行图优化计算。

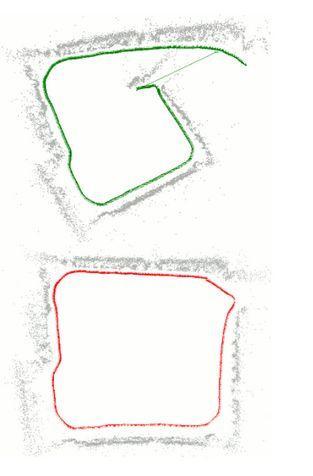
3.2.3 闭环检测
后端优化可能得到一个比较优的解,但当运动回到某一个之前去过的地方,如果能认出这个地方,找到并与当时的关键帧进行比较,就可以得到比单用后端优化更准确更高效的结果。闭环检测就是要解决这个问题。
闭环检测有两种方式,一是根据估计出来的相机的位置,看是否与之前否个位置邻近;另外一种是根据图像,自动识别出来这个场景之前到过,并找到当时的关键帧。目前常用的后一种方法,其实是一个非监督的模式识别问题。比较常用的方法是采用Bag-of-Words(BOW),ORB-SLAM就是使用这个方法来进行闭环检测。