3.0 KiB
远程控制-键盘插件
使用远程连接到 AP1 上后,我们想要控制 AP1运动,发现键盘控制车不动。
在 OS 系统中程序默认识别的是插在车载电脑上的键盘外设,远程主机的键盘命令程序无法接收,键盘控制指令则无法执行。
为了解决远程连接控制的问题,我们为用户提供了键盘包,可获取远程主机键盘的按键指令,将控制命令发送到车载主机上。
功能描述:
该功能包为Autolabor 机器人远程连接时,提供用户端主机键盘控制功能。
适用系统版本
AutolaborOS-2.2.1及以上
注:如是2.2.1以下的版本需要手动下载安装该功能包,安装教程见本文最末。
OS系统->设置->详细信息可查看系统版本号,如无版本号则为2.2.1以下版本。
要求:
该插件与键盘鼠标不能同时使用,使用时需拔掉插在电脑上的键盘设备
一、配置
以SLAM建图为例,演示该插件的配置方法。
1. 远程连接
使用远程桌面工具,连接到车载电脑上。
2. 点击【开始建图】

程序启动,RVIZ打开。此时,在远程端我们用键盘控制,车无法运动。
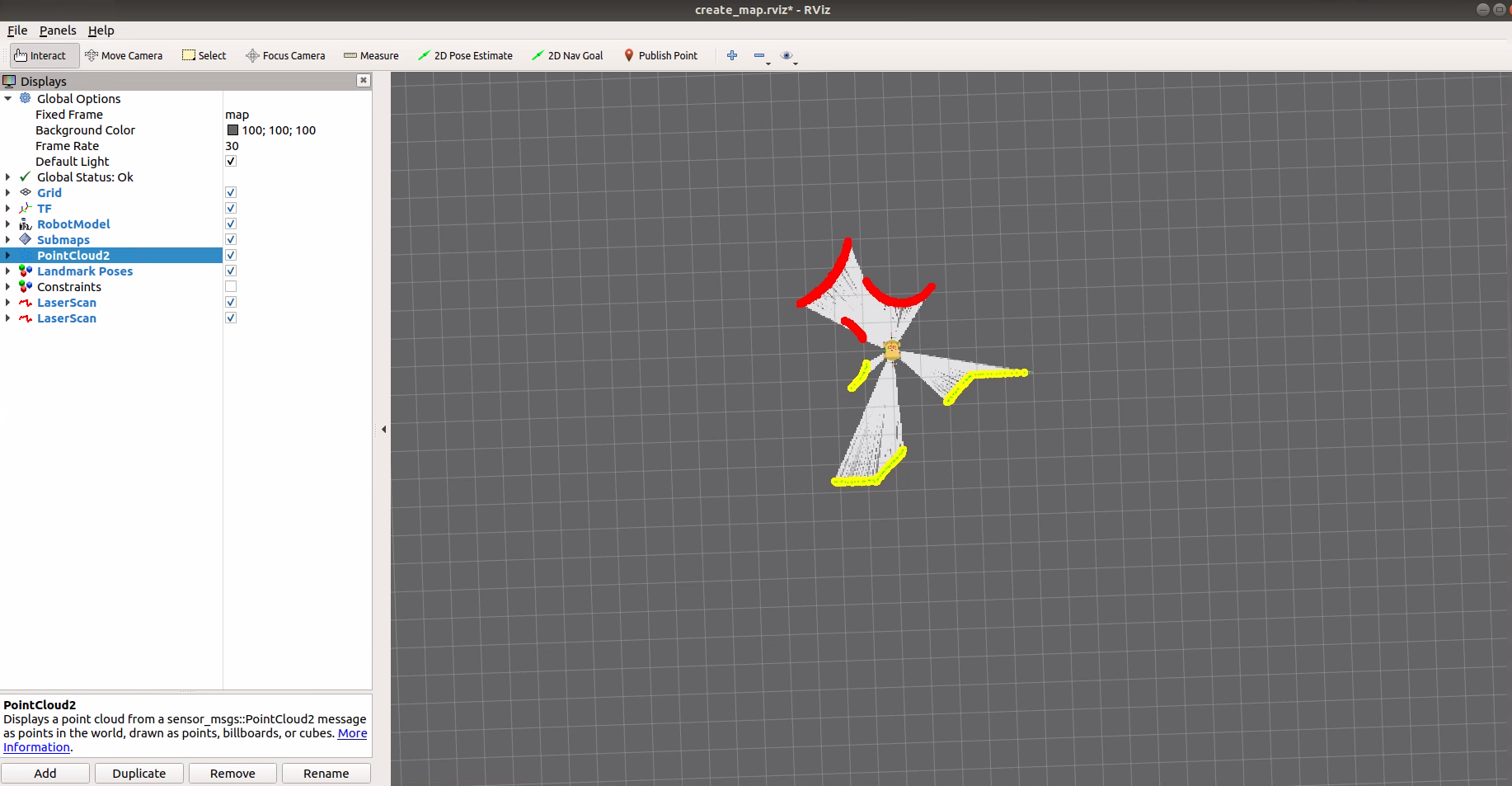
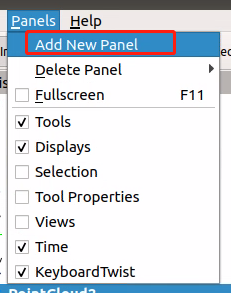
3. 加载插件
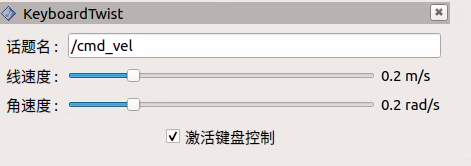
RViz 的左上角依次点击 Panels -> Add New Panel -> rviz_keyboard_twist -> KeyboardTwist
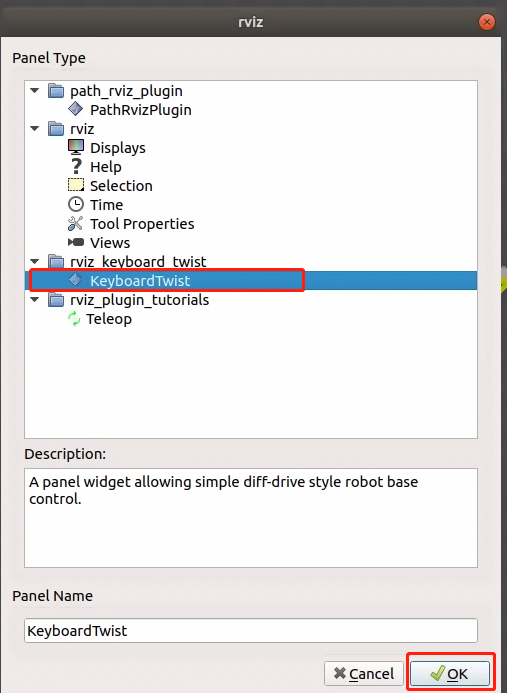
加载完毕:
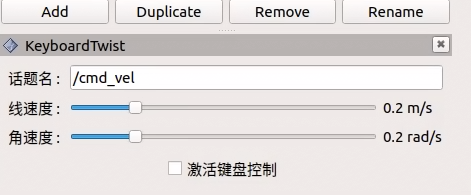
做完以上操作后 Ctrl + S 保存 RViz 配置,如忘记保存,则下次进来要重复操作。
二、使用
1. 激活键盘控制
鼠标勾选激活键盘控制
2. 键盘控制
使用键盘上下左右控制,此时车能够被远程控制。
3. 取消键盘控制
键盘控制完成后,必须取消,否则键盘按键失灵无法使用。
四、重要说明
- 需要远程使用的应用都需要在 RViz 中单独添加该插件,单个RViz中添加的插件不会应用到全局程序。
- 使用该插件远程控制前,要求在本机确认机器人的键盘控制是正常的。
- 键盘控制使用完毕后,必须要取消键盘控制。
附录:安装方法
适用系统
AutolaborOS2.2.1 以下系统用户
1. 下载程序包
进入 /home/autolabor/catkin_ws/src 目录,执行
git clone https://github.com/autolaborcenter/rviz_keyboard_plugin.git
或访问 https://github.com/autolaborcenter/rviz_keyboard_plugin.git 下载源代码,放入 /home/autolabor/catkin_ws/src 目录中
给新加入的文件添加操作权限,在/home/autolabor/catkin_ws 目录下,右键打开终端,执行
sudo chmod -R 777 /home/autolabor/catkin_ws/src/
输入密码 autolabor,回车
2. 编译
还是在 /home/autolabor/catkin_ws 目录下,终端执行
sudo rm -rf build/ devel/ logs/ .catkin_tools/
输入密码 autolabor,回车,然后执行
catkin build -j2