1.9 KiB
1.9 KiB
组装与测试
本文将引导你安装导航套件并对各部件进行测试
电气拓扑

Autolabor Box 1.0 的 用户请参考: Autolabor Box 1.0 电气拓扑图
{kind=link}
组装
详请参照视频
测试
我们提供了一套工具软件,并将其放置在电脑桌面,你可以用来检测导航套件中各部件能否正常工作

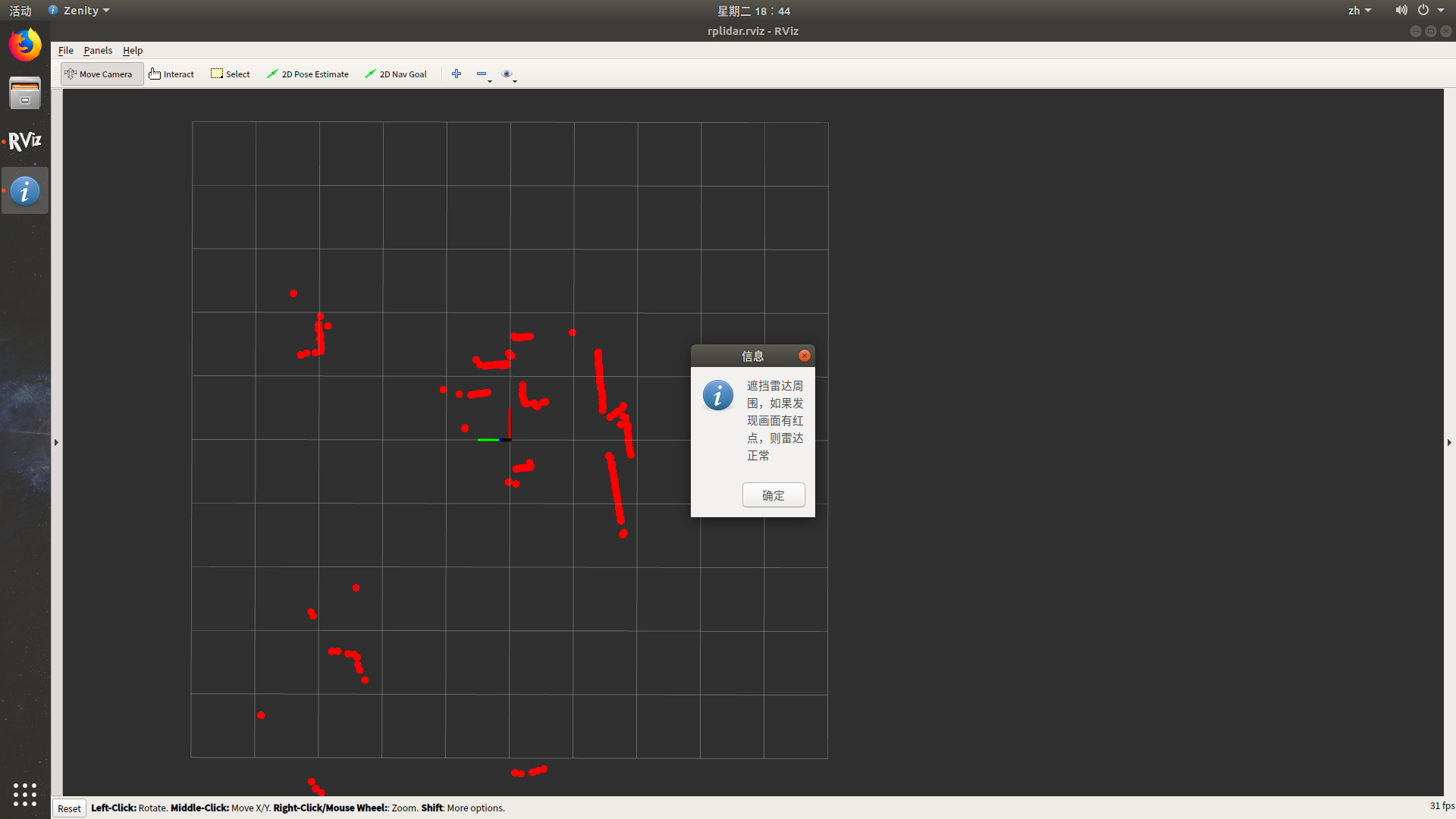
- 激光雷达测试
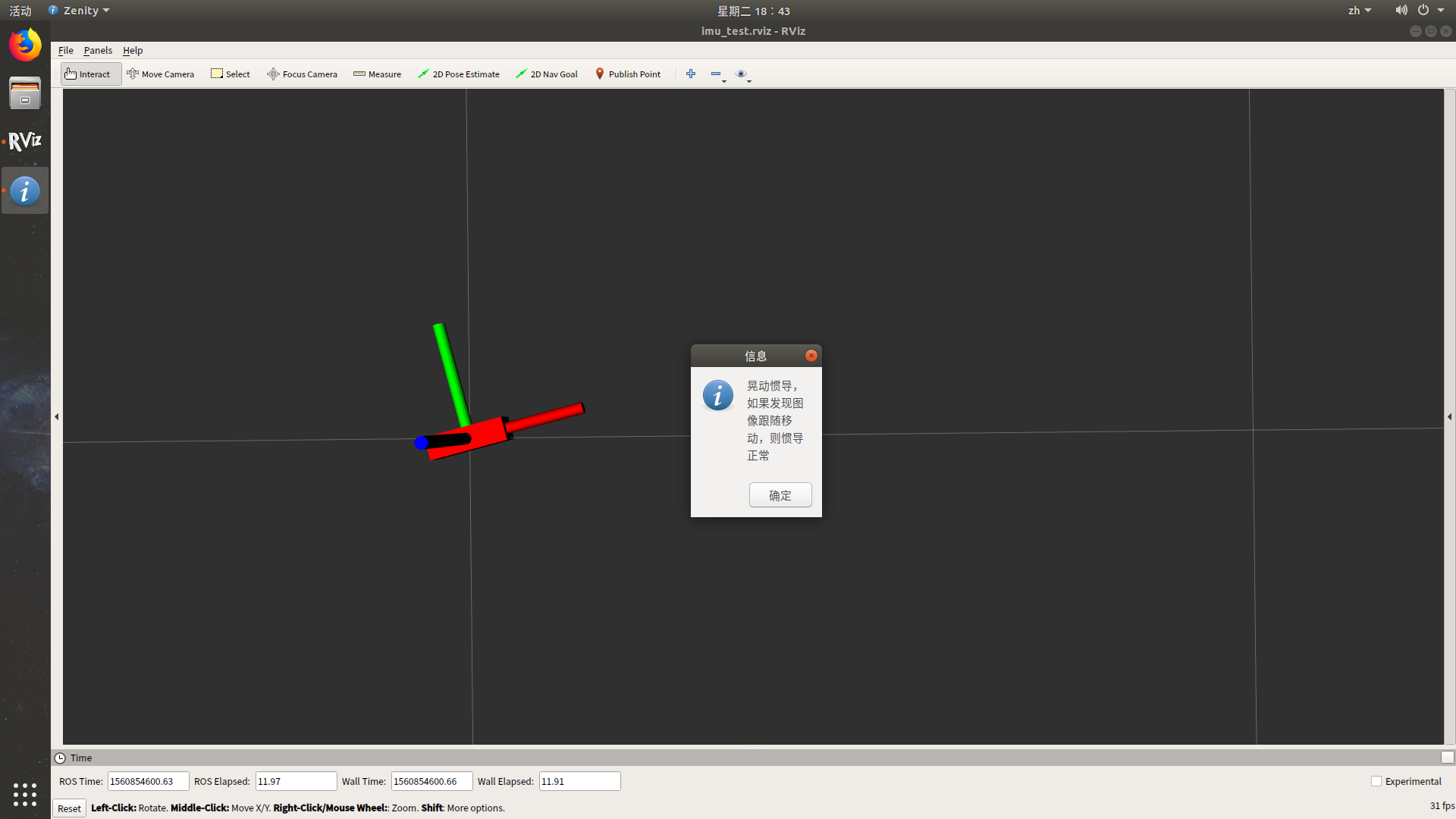
- 惯导测试 (Autolabor Box 2.0 用户无需使用该工具)
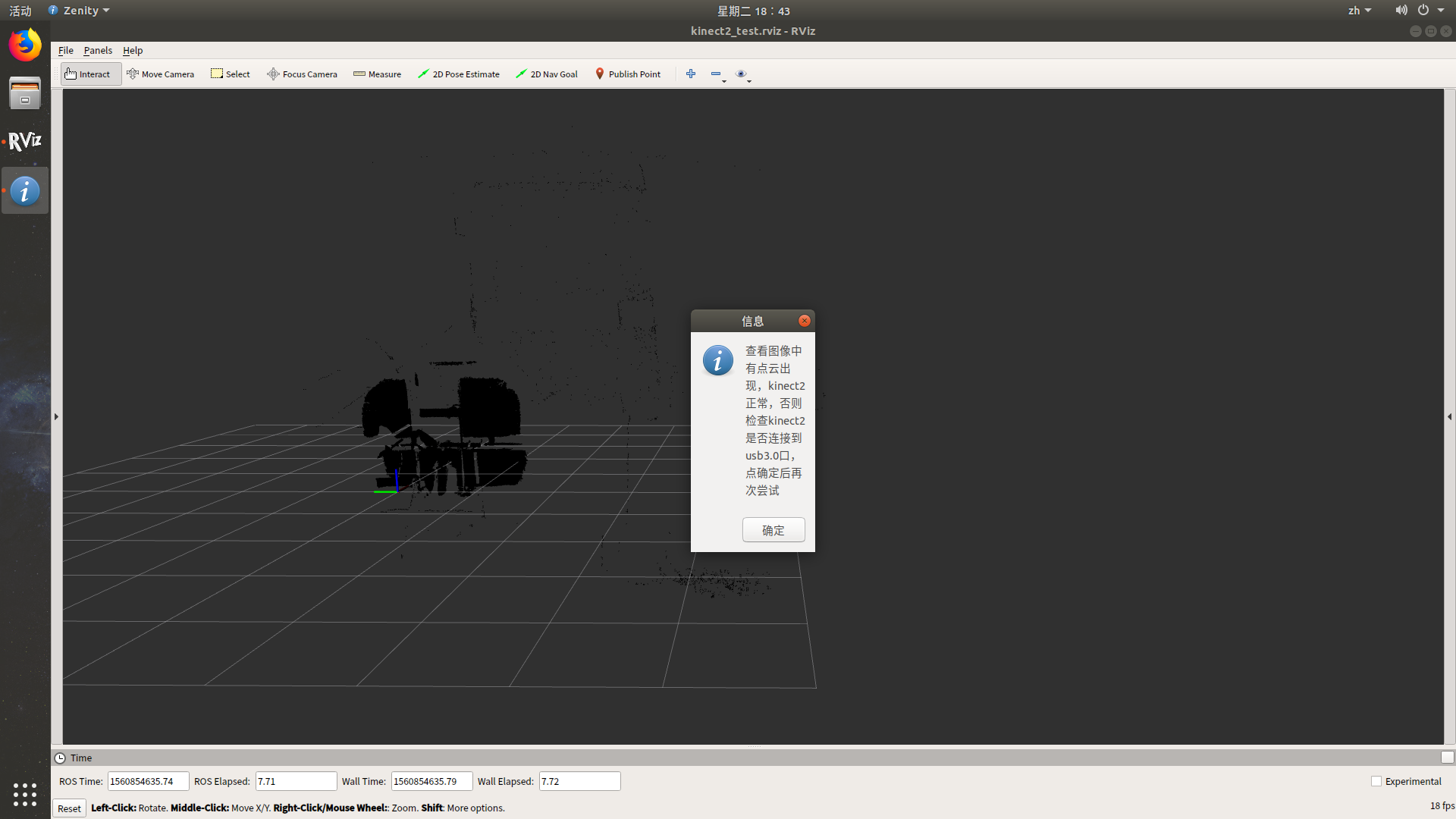
- Kinect测试
-
联合测试
点击
开始建图,尝试使用键盘方向键控制小车运动。
常见问题
-
“电池充电接口、工控机电源接口、Kinect-Hub电源接口可以互换适配器吗?”
少年,劝你别有这么大胆的想法!
尽管这三者物理外形一致,但电气规格
并不通用,使用时务必注意,错误的接线方式将会导致设备损坏,甚至危及人身安全 -
“为什么风扇噪音非常大?”
众所周知,AMD旗下CPU最大的特点就是
发热量大性能强劲,并且工控机内部结构十分紧凑,只有风扇维持在较高转速才保证系统正常工作 -
“为什么我看不到 Kinect 的数据?”
Kinect-Hub 的数据线另一端必须插在工控机
USB3.0接口上,否则将无法从工控机读取到Kinect的数据 -
“ USB-Hub 上面的接口不通用吗?(仅 Autolabor-BOX 2.0 用户)”
不通用,组装时务必按照文字提示插入设备,错误的接线方式将无法正常建图、定位、避障,甚至危及人身安全
-
“为什么建图时无法使用键盘控制小车运动?”
尝试拔掉多余的鼠标或键盘,最好只保留一把键盘与工控机连接,然后重新尝试建图