3.6 KiB
RTK循迹模块使用说明
常见问题
最常见导致故障有以下几种
- 未正确配置NRTIP服务账号密码
- 主机没有互联网连接
- USB接口插错
- 主天线未连接或未连接在ANT1接口
- 所处位置接收卫星信号不佳
通常启动rtk测试功能或循迹功能将会在控制台输出出错信息,通过此信息可以排除大部分故障。
例如:
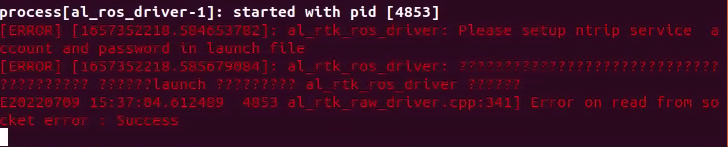
没有互联网连接
当出现此提示时,表示ntrip client 程序无法连接ntrip server,代表本机没有互联网连接。当出现此提示时,可打开浏览器访问常见网站,以检查是否网络连接正常。
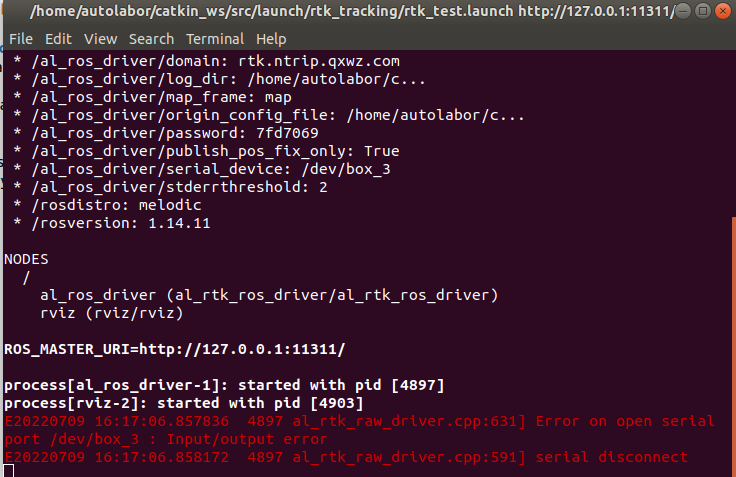
USB口接口插错
当出现如下图提示时,代表驱动程序没有检测到卫星接收机硬件,造成这种情况通常时卫星接收的没有插在AP1套件USB HUB对应的#3接口上,如果您使用的不是AP1套件要确保将launch 文件中串口地址修改为您的接口地址, 通常为/dev/ttyUSB0 或者 /dev/ttyUSB1 可通过ls /dev/tty* 查看。
除此以外,另外一端的type-c插头要确保插在 卫星接收机的UART1 接口上, 插在UART2、UART3接口无法正常工作,如果需要使用UART2、UART3接口请修改驱动程序启用相应接口。
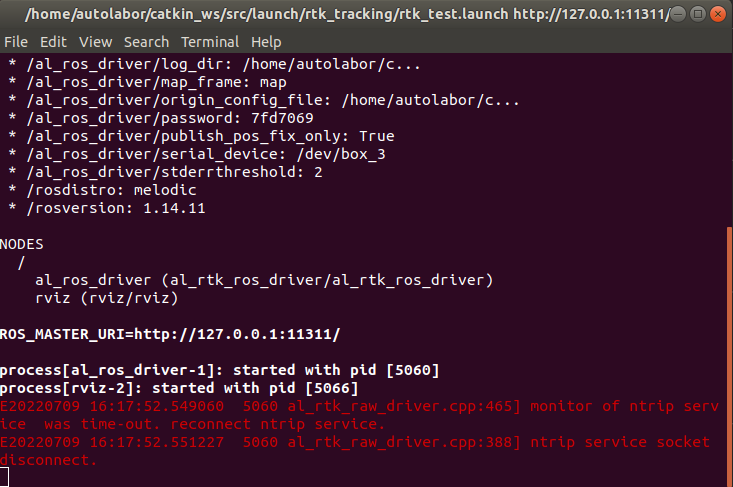
主天线未连接/连接错误
正常情况下,在遮挡不是极为严重的环境卫星接收机都会收到定位信息,即GPGGA消息。驱动程序会将第一包GPGGA信息发送给NTRIP服务以获取后续的差分数据。但是当主天线未连接或者未连接到ANT1接口时,卫星接收机将完全无法收到GPGGA数据,这将导致NTRIP服务等待过长时间超时,出现如下错误。
(当然当网络不佳的情况下,也有可能出现同样的超时错误。)
判断故障的工具
ROS 话题
多数情况下,您可以通过rostopic 工具将卫星接收机的输出显示出来,以协助判断。
首先,您需要引入当前工作空间的环境变量,通过
source ~/catkin_ws/devel/setup.bash
其次您可以通过 rostopic list命令显示所有的话题,确认驱动程序是否已经运行。
rostopic list
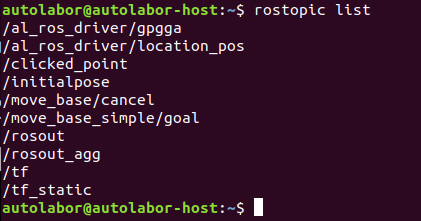
如果出现了/al_ros_driver/gpgga /al_ros_driver/location_pos 代表卫星接收机驱动已经工作正常。
/al_ros_driver/gpgga 代表卫星接收机原始的gpgga数据,即未解算的收星数据,通过如下命令可进行显示
rostopic echo /al_ros_driver/gpgga
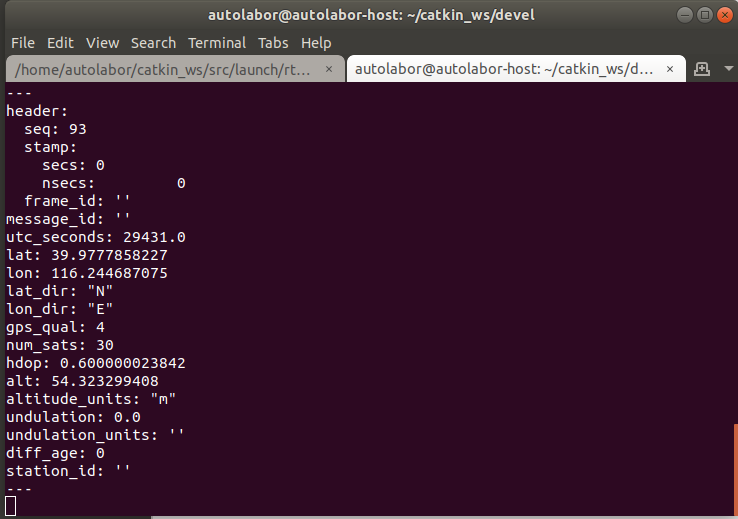
其中包含经纬度,utc时间,收星数量,高度等信息。此为卫星接收机的原始数据,如此信息输出正常,代表卫星接收机的 USB口、主天线都连接正确。
/al_ros_driver/localtion_pos 话题输出的是固定解位置经ENU坐标系转换后的坐标, 此话题的数据仅仅在卫星接收机处于输出高精度固定解的时候输出。 如果此话题输出数据意味着nrtip 服务配置正确、互联网连接正常、卫星收星数量优秀,可以进行无人导航使用。

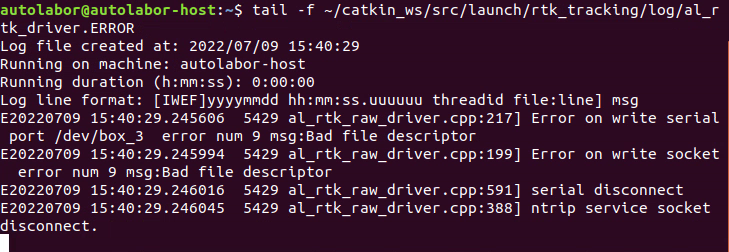
日志文件
al_rtk_raw_driver 会将所有过程以日志形式存储在 rtk_tracking/log 目录下, 通过查看日志文件可以判断卫星接收机的工作状态,可通过如下命令分别查看INFO日志和ERROR日志
tail -f ~/catkin_ws/src/launch/rtk_tracking/log/al_rtk_driver.INFO
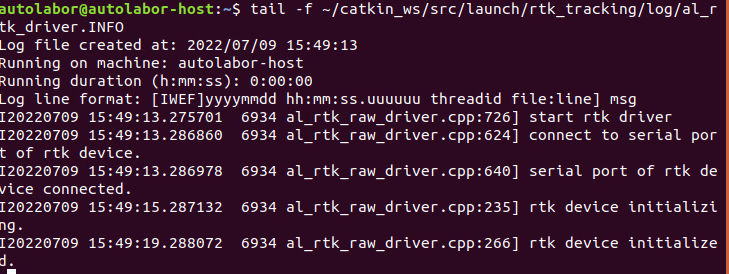
tail -f ~/catkin_ws/src/launch/rtk_tracking/log/al_rtk_driver.ERROR