8.3 KiB
软件介绍
完整视频
以下为完整介绍视频,包含全部文档内容。
功能简介
启动入口
Autolabor M2软件的所有功能启动入口都在桌面的相应文件夹内
包括
- 2D SLAM
- 3D SLAM
- RTK 寻迹
- 硬件测试
2D SLAM 过程
启动
点击桌面图标 SLAM 建图导航->2D->开始建图
建图过程
使用配套的控制手柄控制机器人平台移动,覆盖空间中的待建图区域。
使用手柄时,注意手柄已经正确连接,并且解除了底盘急停状态,详情可参考手柄使用说明。
建图过程中,注意控制移动速度,应不高于手柄二挡,并且尽量走S形路线覆盖建图区域。
建图的质量将直接影响后续定位和导航的效果,如建图质量不佳可重新进行。
SLAM算法适用于周围有明显特征的人造环境(室内),例如有平整的墙面,直角特征。
不适用于琐碎复杂的环境,例如有较多桌腿或凳子腿,窗帘捶地,有较多植物。
保存
建图完成后点击 SLAM建图导航->2D->保存并停止建图,然后等待rviz窗口退出,即保存完成。
构建好的地图将保存在 /home/autolabor/catkin_ws/src/applications/autolabor/m2/2dslam_cartographer/data 路径下
文件名为 map.pbstream.
3D SLAM 过程
启动
点击桌面图标 SLAM 建图导航->3D->开始建图
建图过程
使用配套的控制手柄控制机器人平台移动,覆盖空间中的待建图区域。
使用手柄时,注意手柄已经正确连接,并且解除了底盘急停状态,详情可参考手柄使用说明。
建图过程中,注意控制移动速度,应不高于手柄二挡,并且尽量走S形路线覆盖建图区域。
建图的质量将直接影响后续定位和导航的效果,如建图质量不佳可重新进行。
SLAM算法适用于周围有明显特征的人造环境(室内),例如有平整的墙面,直角特征。
不适用于琐碎复杂的环境,例如有较多桌腿或凳子腿,窗帘捶地,有较多植物。
保存
建图完成后点击 SLAM建图导航->3D->保存并停止建图,然后等待rviz窗口退出,即保存完成。
构建好的地图将保存在 /home/autolabor/catkin_ws/src/applications/autolabor/m2/3dslam_cartographer/data 路径下
文件名为 map.pbstream.
RTK 寻迹
配置千寻账号
RTK寻迹功能在使用前需配置千寻账号和4G网卡,确保机器人平台可以连接互联网。
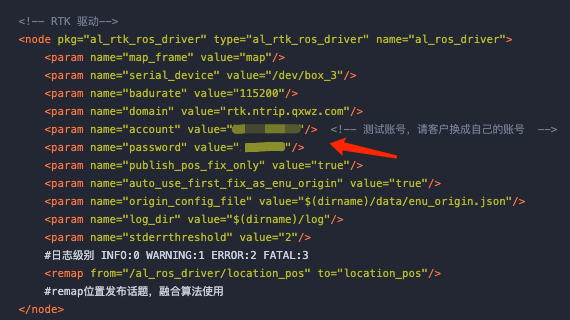
打开 /home/autolabor/catkin_ws/src/applications/autolabor/m2/rtktracking_mpc/rtktracking_mpc.launch 文件
编辑 al_rtk_ros_driver 节点中的 account 和 password 属性,替换成您自己的千寻账号和密码。
4G网络
准备与Linux 兼容的USB 4G网卡和4G SIM 卡,插入主机USB接口,确认互联网连接正常即可。
可使用系统附带的浏览器访问互联网网站测试。
主要注意,由于主机以太网网口已经被多线激光雷达占用,并将默认路由指向了以太网网口。如果4G网卡在系统启动前插入USB口可能造成无法连接互联网。
可通过拔掉4G网卡再插入的方式解决。
通过WIFI连接互联网同理,如遇到无法连接互联网的情况,可通过关闭WIFI再重新打开解决。
文件的组织形式
工作空间
Autolabor M2 套件的ROS工作空间位于 /home/autolabor/catkin_ws 目录下
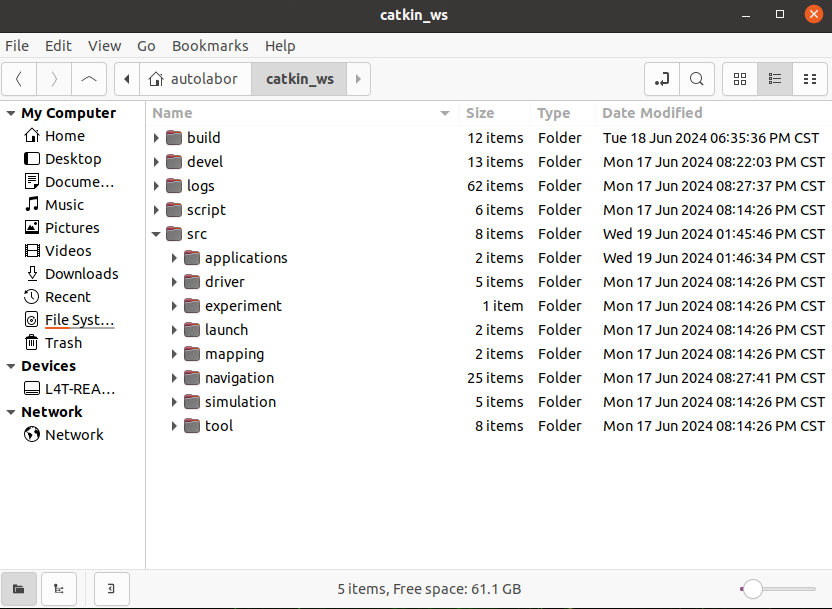
包含所有ros软件包的源代码、launch文件、算法配置文件和urdf文件。
其中软件包位于 catkin_ws/src/ 路径下
启动launch文件和配置文件位于 catkin_ws/src/applications/autolabor/m2 路径下
软件包
- driver 包含所有硬件驱动程序
- mapping 包含用于2D/3D SLAM建图的cartographer 算法包
- navigation 包含 move base 全局路径规划器、MPC 局部路径规划器、TEB局部路径规划器、Autolabor粒子滤波、Autolabor寻迹
配置文件
M2 的所有配置文件位于 catkin_ws/src/applications/autolabor 目录下,此目录下内容不建议修改,如需修改可通过派生修改的方式
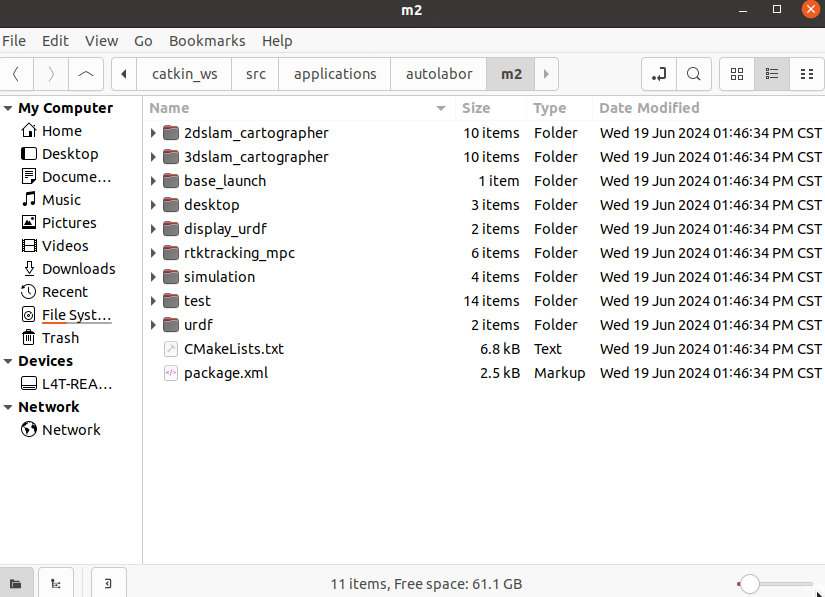
- 2dslam_cartographer 2d cartographer 建图和定位的启动文件和配置
- 3dslam_cartographer 3d cartographer 建图和定位的启动文件和配置
- rtktracking_mpc 北斗RTK寻迹导航的启动文件和配置
- base_launch 底盘驱动launch文件
- urdf 机器人描述文件
- test 硬件测试
- desktop 桌面快捷方式
对于1、2、3 的子目录
config 保存所有配置文件
data 保存用户数据,例如地图,RTK展开点坐标
自定义配置
当您需要修改配置或者组织自己launch文件时,我们建议您不要修改 applications/autolabor 目录下的内容,
而是在 applications 目录下创建一个自定义的目录,并创建包文件(package.xml 和 CMakelist.txt). 将autolabor/m2下您需要对应的功能目录复制到您自定义目录下,修改编译。
具体步骤如下
- 在 applications 目录下创建自定义目录 custom (名字可按照您需求修改)
- 复制 applications/autolabor/m2 目录下 CMakeLists.txt 和 package.xml 文件到custom目录下
- 使用文本编辑器打开 CMakelists.txt ,修改 project(m2) 为 project(custom) , 需要与目录名一致
- 使用文本编辑器打开 package.xml, 修改 m2 为 custom
- 复制您需要的功能目录到custom 目录,例如 2dslam_cartographer
- 使用终端进入到custom包所在目录 cd ~/catkin_ws/src/applications/custom
- 编译 catkin build --this
- source 环境变量 source ~/catkin_ws/devel/setup.bash
这样您可以在自定义包中修改launch文件和配置文件。而不会影响官方文件,当您的配置出现故障时可重复以上步骤恢复。
配置文件介绍
2D SLAM
2dslam_cartographer 目录下
create_map_start.sh 建图启动脚本
create_map_stop.sh 停止并保存地图脚本
navigation_start.sh 导航脚本
navigation_stop.sh 停止导航脚本
2dslam_cartographer_mapping.launch 建图启动launch文件
2dslam_cartographer_navigation.launch 导航启动文件
config 目录下包含cartographer 建图/定位的配置文件,以及move base 全局路径规划器,局部路径规划器配置文件。
data 目录保存用户构建的地图文件,文件名为 map.pbstream
3D SLAM
3dslam 的文件结构与2dslam完全相同
RTK寻迹
rtktracking_mpc 文件夹下保存rtk寻迹功能所需的launch文件和配置
rtktracking_mpc_start.sh rtk寻迹启动脚本
rtktracking_mpc_stop.sh rtk寻迹停止脚本
rtktracking_mpc.launch 启动launch
config 目录包含 move base 全局路径规划器,局部路径规划器配置文件
data 目录保存WGS84到平面直角坐标系展开点配置文件
硬件测试
硬件测试启动入口位于桌面硬件测试目录下,点击对应的图标即可启动
针对m2套件包含
- 2D激光雷达测试
- 3D激光雷达测试
- IMU测试
- 底盘遥控测试
- RTK测试 (需配置千寻账号,4G网卡,室外环境)
M2套件不支持PICO深度相机测试