14 KiB
激光SLAM
目录
- SLAM介绍
- 基于激光SLAM的机器人自主导航
- Autolabor M1 SLAM 导航功能详解
- 2D SLAM 实现原理
- 3D SLAM 实现原理
SLAM介绍
SLAM,全称是 Simultaneous Localization and Mapping,同时定位与地图构建。
SLAM 技术解决的是,我在哪里?(定位Localization )我周围是什么样?(建图Mapping)这两个问题。
移动设备从未知环境中的某一点开始运动,根据传感器获取到的数据,即时计算获取传感器的位置并绘制周围的环境。

SLAM 的应用很广泛,有扫地机器人、无人驾驶汽车、无人机,三维场景重建等。
根据使用传感器不同,SLAM的可分为激光SLAM和视觉SLAM(VSLAM),本文介绍的是激光SLAM,对视觉SLAM相关知识感兴趣的可以看这里。
基于激光SLAM的机器人自主导航
激光SLAM导航,指的是使用激光雷达采集的数据进行建图与定位(SLAM),并在构建的环境地图中自动导航(规划+控制)。
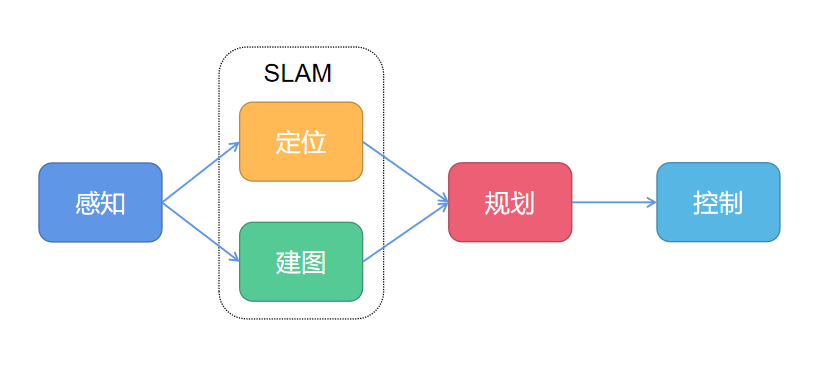
地图构建完成后,给出目标点,根据当前位置信息与已知环境地图规划出可行走路径,控制机器人运动,最终达到目标点。

以上只是简单概述了机器人导航的流程,但 SLAM 与 路径规划/Planning 都是很复杂的内容,在此不做过多的探讨。
Autolabor M1 SLAM 导航功能详解
Autolabor SLAM 导航使用的是谷歌开源的 Cartographer,支持多平台和传感器配置,提供2D和3D实时同步定位与建图,使用回环检测消除建图产生的累积误差,建图效果更好,在国内外众多机器人应用上得到了广泛使用。
Cartographer is a system that provides real-time simultaneous localization and mapping (SLAM) in 2D and 3D across multiple platforms and sensor configurations.
2D SLAM 实现原理
传感器介绍
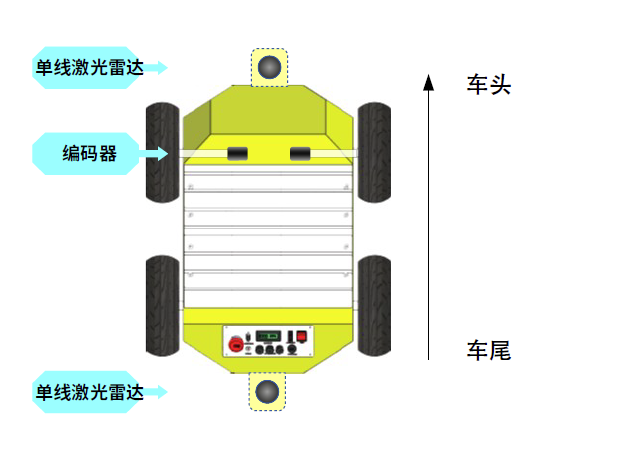
2D SLAM 用到的传感器有:
- 单线激光雷达x2,安装在M1内部前后位置
- 编码器/轮速里程计x2,安装在车体内部前侧
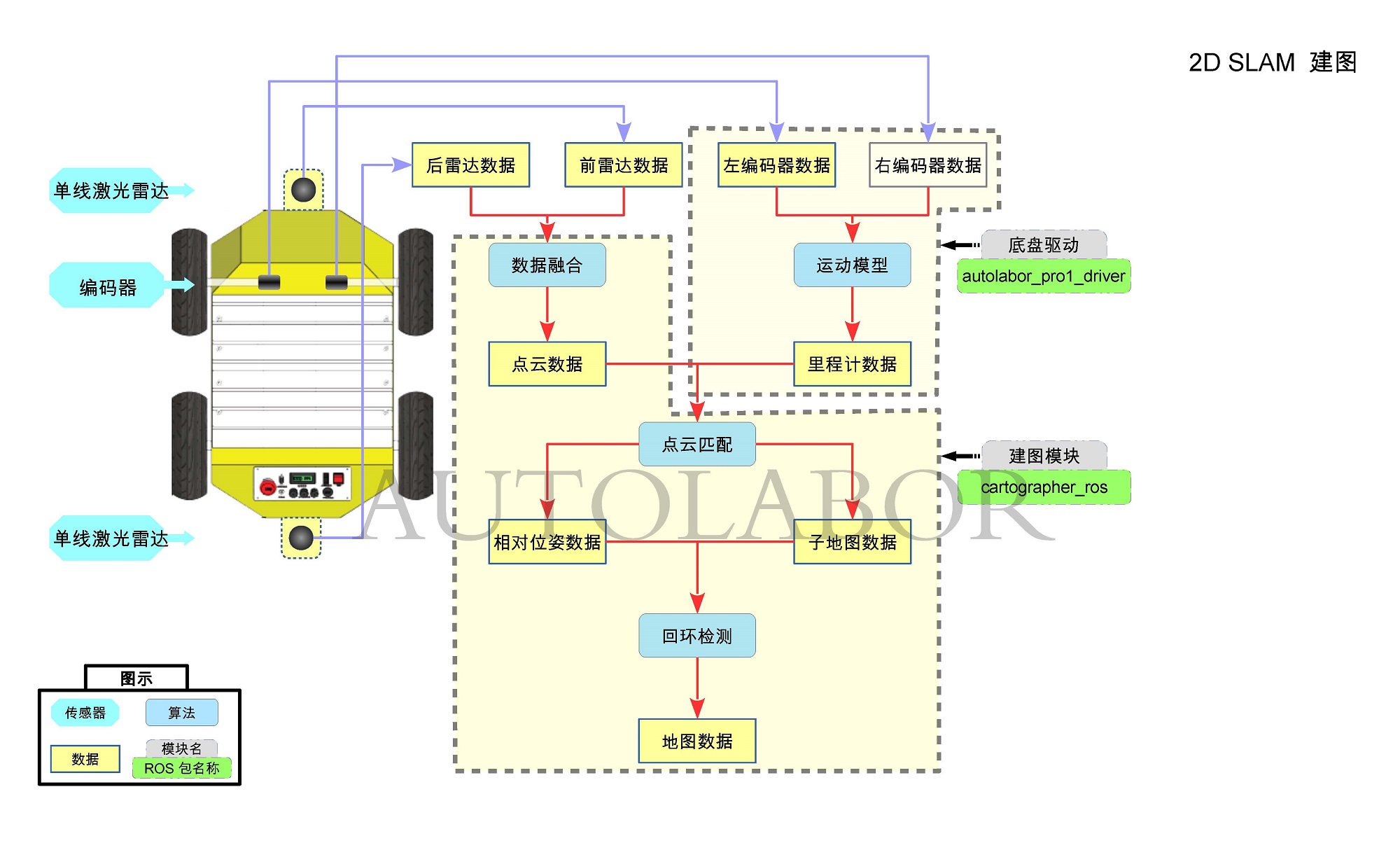
2D SLAM 建图
| 步骤 | 输入数据 | 操作 | 输出数据 | 使用ROS包 |
|---|---|---|---|---|
| 1 | 左编码器数据 右编码器数据 | 使用运动模型计算编码器数据,得到符合ROS标准的里程计数据 | 里程计数据 | autolabor_pro_driver |
| 2 | 前雷达数据 后雷达数据 | 过滤并融合前后激光雷达采集的数据,得到机器人周围环境点云数据 | 雷达点云数据 | cartographer_ros laser_filters |
| 3 | 里程计数据 点云数据 | 点云匹配 | 相对位姿数据 子地图数据 | cartographer_ros |
| 4 | 相对位姿数据 子地图数据 | 回环检测,得到子地图拼接的全地图数据 | 地图数据 | cartographer_ros |
Cartographer 2D 建图 launch配置示例
<!-- 建图节点 -->
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find autolabor_navigation_launch)/params/cartographer
-configuration_basename second_generation_mapping.lua"
output="screen">
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros" type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
2D SLAM 导航
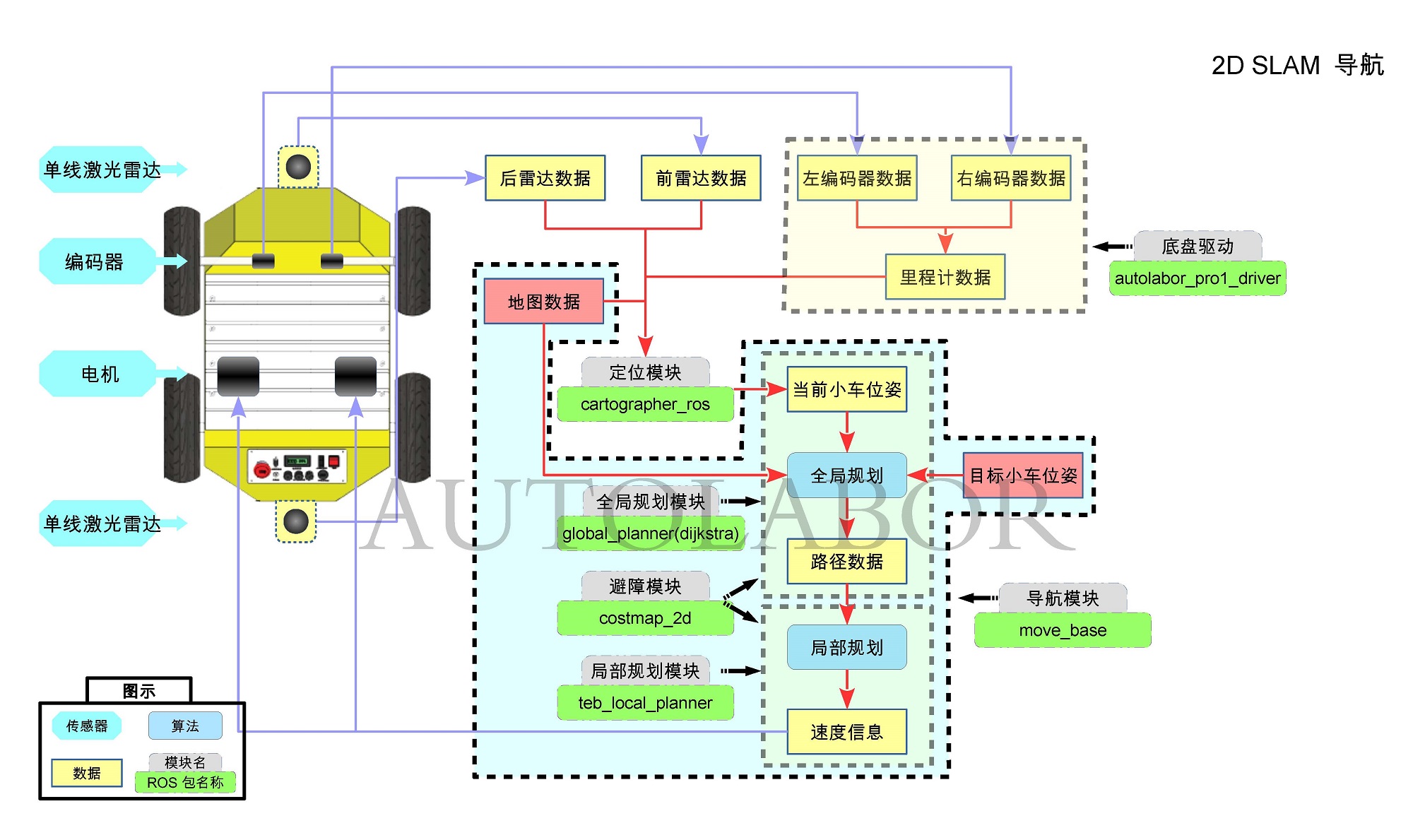
| 步骤 | 输入数据 | 操作 | 输出数据 | 使用ROS包 |
|---|---|---|---|---|
| 1 | 左编码器数据 右编码器数据 | 使用运动模型计算编码器数据,得到符合ROS标准的里程计数据 | 里程计数据 | autolabor_pro_driver |
| 2 | 前雷达数据 后雷达数据 里程计数据 地图数据 | 将机器人的实时数据与已构建的地图进行匹配 | 当前机器人在环境中的位姿 | cartographer_ros |
| 3 | 目标机器人位姿 | 给机器人制定一个目标点 | move_base | |
| 4 | 当前机器人位姿 地图数据 目标机器人位姿 | 根据机器人当前位姿与地图数据,进行全局规划路线 | 路径数据(初步预估导航路线) | global_planner(dijkstra) |
| 5 | 路径数据 地图数据 前雷达数据 后雷达数据 | 根据规划路径开始导航,进行过程中随着实际环境、障碍物变化,进行局部路径规划,实时避障 | 局部路径规划 避障 | costmap_2d teb_local_planner |
| 6 | 速度信息 /cmd_vel | 向底层发送速度命令 | move_base |
说明:
- move_base, global_planner(dijkstra), costmap_2d 这些功能包(package)都从属于 Navigation 导航这个大的功能包集,teb_local_planner 是navigation包的一个插件。
- 机器人导航过程中,会按照周围环境、实时障碍物做调整不断规划调整路径,向底层发布指令,步骤五和六是一个多次的过程,并非一次就结束了。
Cartographer 2D 导航 launch配置示例
<!-- 定位模块 -->
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find autolabor_navigation_launch)/params/cartographer
-configuration_basename second_generation_location.lua
-load_state_filename $(find autolabor_navigation_launch)/map/map.pbstream"
output="screen">
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="
-resolution 0.05
--noinclude_unfrozen_submaps"
output="screen">
</node>
<node pkg="cartographer_initialpose" type="cartographer_initialpose" name="cartographer_initialpose" >
<param name="configuration_directory" value="$(find autolabor_navigation_launch)/params/cartographer" />
<param name="configuration_basename" value="second_generation_location.lua" />
</node>
<!-- 导航模块 -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find autolabor_navigation_launch)/params/navigation/move_base/navigation_move_base.yaml" command="load" />
<rosparam file="$(find autolabor_navigation_launch)/params/navigation/costmap/two_laser_global_costmap_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find autolabor_navigation_launch)/params/navigation/costmap/two_laser_local_costmap_params.yaml" command="load" ns="local_costmap"/>
<rosparam file="$(find autolabor_navigation_launch)/params/navigation/global_planer/global_planner_params.yaml" command="load" ns="GlobalPlanner"/>
<rosparam file="$(find autolabor_navigation_launch)/params/navigation/local_planer/navigation_teb_local_planner_params.yaml" command="load" ns="TebLocalPlannerROS"/>
</node>
3D SLAM 实现原理
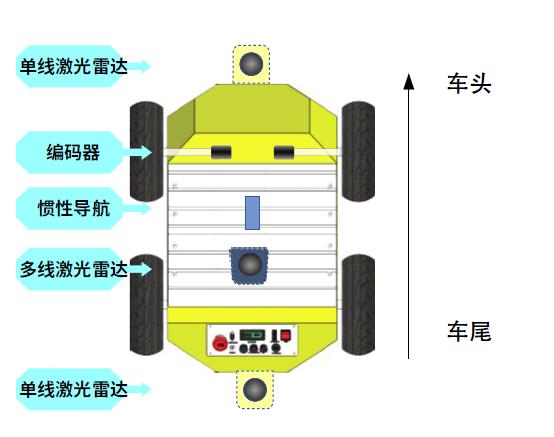
传感器介绍
3D SLAM 用到的传感器有:
- 多线激光雷达,安装在M1套件内
- 单线激光雷达x2,安装在M1内部前后位置
- 编码器/轮速里程计x2,安装在车体内部前侧
- 惯导,安装在M1套件内
3D SLAM 建图
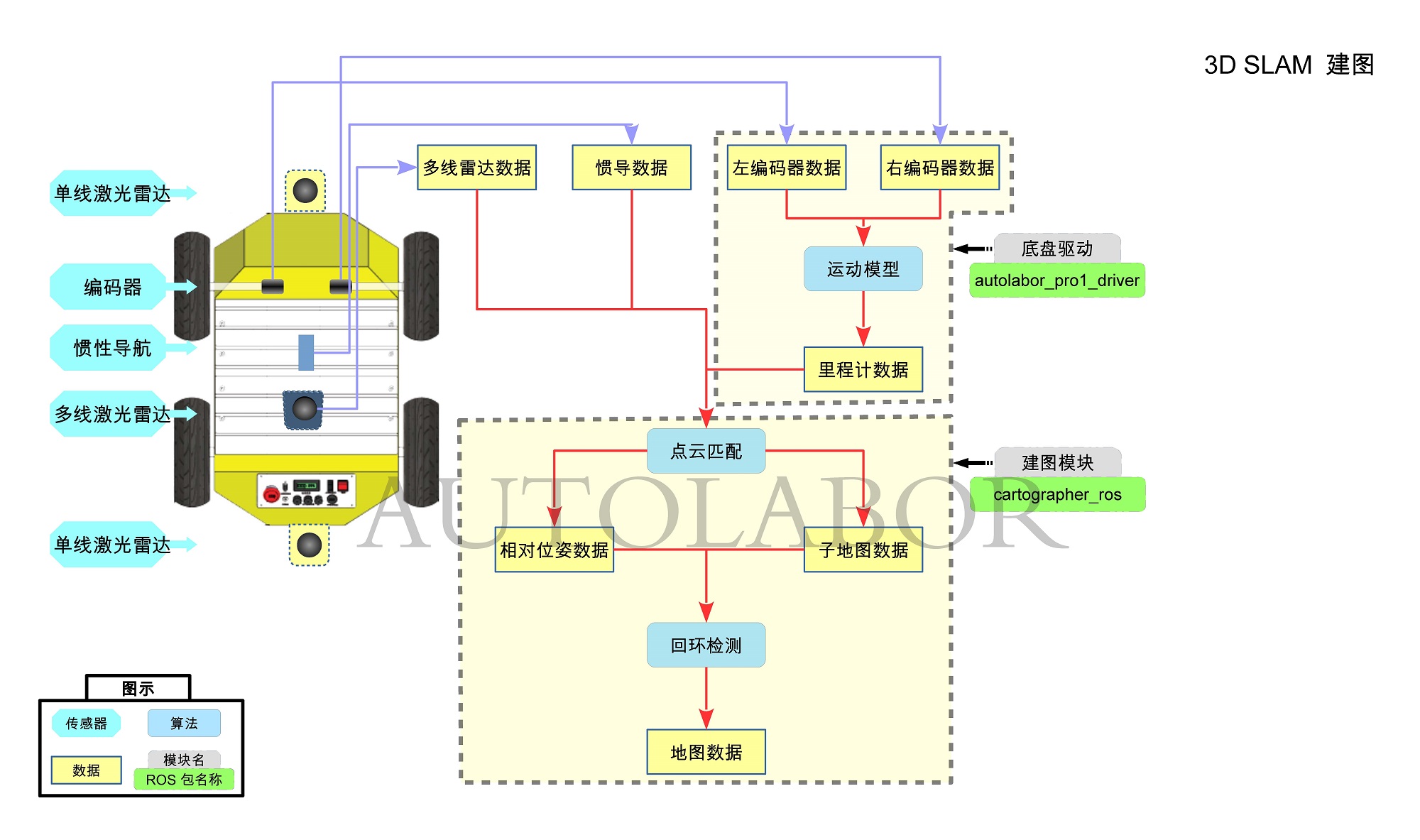
| 步骤 | 输入数据 | 操作 | 输出数据 | 使用ROS包 |
|---|---|---|---|---|
| 1 | 左编码器数据 右编码器数据 | 使用运动模型计算编码器数据,得到符合ROS标准的里程计数据 | 里程计数据 | autolabor_pro_driver |
| 2 | 多线雷达数据 惯导数据 里程计数据 | 点云匹配 | 相对位姿数据 子地图数据 | cartographer_ros |
| 3 | 相对位姿数据 子地图数据 | 回环检测,得到子地图拼接的全地图数据 | 地图数据 | cartographer_ros |
Cartographer 3D 建图 launch配置示例
<!-- 建图节点 -->
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find autolabor_navigation_launch)/params/cartographer
-configuration_basename third_generation_mapping.lua"
output="screen">
<remap from="points2" to="rslidar_points" />
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros" type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find autolabor_navigation_launch)/rviz/3d_mapping.rviz" />
3D SLAM 导航
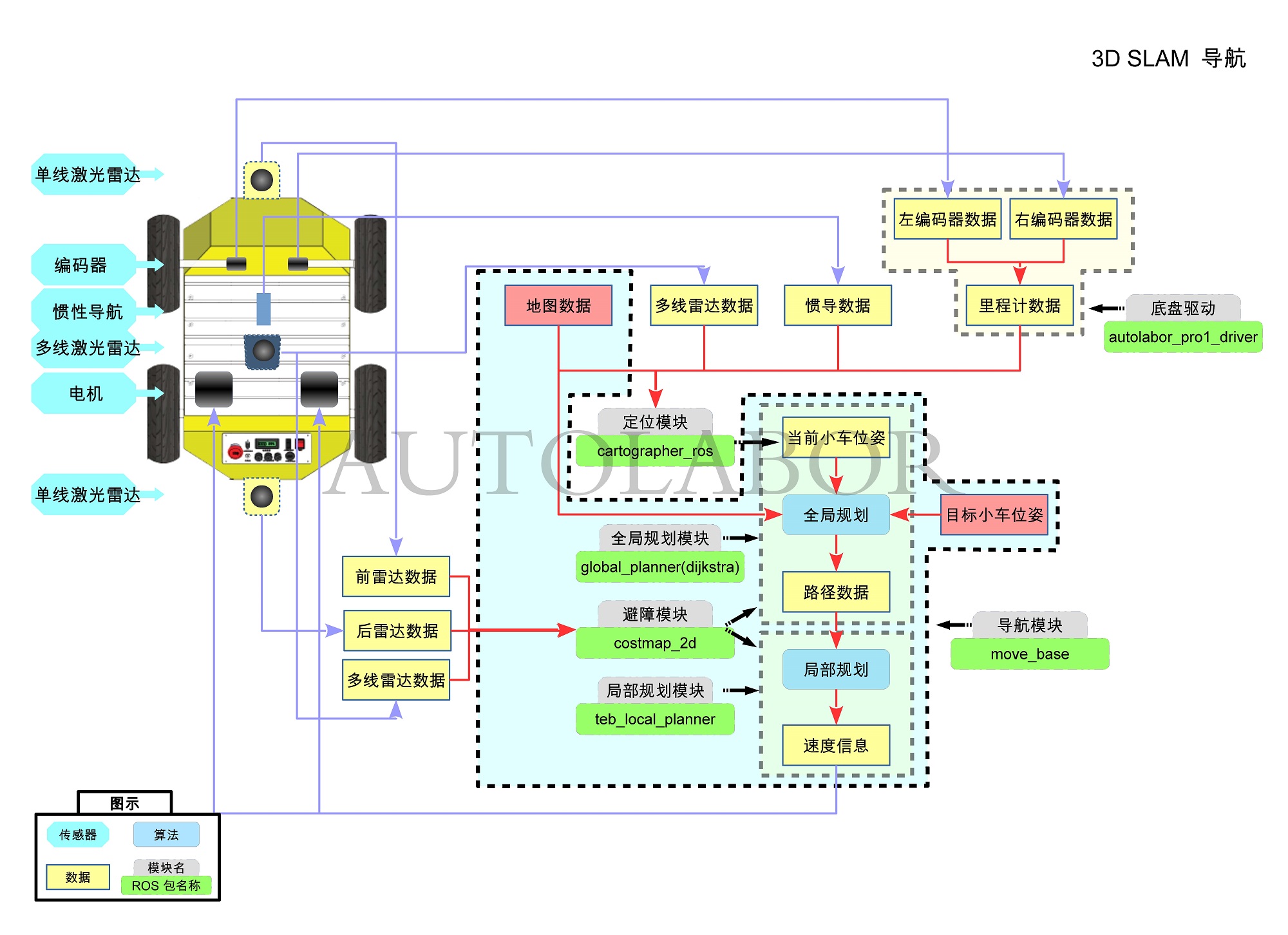
| 步骤 | 输入数据 | 操作 | 输出数据 | 使用ROS包 |
|---|---|---|---|---|
| 1 | 左编码器数据 右编码器数据 | 使用运动模型计算编码器数据,得到符合ROS标准的里程计数据 | 里程计数据 | autolabor_pro_driver |
| 2 | 多线雷达数据 惯导数据 里程计数据 地图数据 | 将机器人的实时数据与已构建的地图进行匹配 | 当前机器人在环境中的位姿 | cartographer_ros |
| 3 | 目标机器人位姿 | 给机器人制定一个目标点 | move_base | |
| 4 | 当前机器人位姿 地图数据 目标机器人位姿 | 根据机器人当前位姿与地图数据,进行全局规划路线 | 路径数据(初步预估导航路线) | global_planner(dijkstra) |
| 5 | 路径数据 地图数据 前雷达数据 后雷达数据 多线雷达数据 | 根据规划路径开始导航,进行过程中随着实际环境、障碍物变化,进行局部路径规划,实时避障 | 局部路径规划 避障 | costmap_2d teb_local_planner |
| 6 | 速度信息 /cmd_vel | 向底层发送速度命令 | move_base |
说明:
- move_base, global_planner(dijkstra), costmap_2d 这些功能包(package)都从属于 Navigation 导航这个大的功能包集,teb_local_planner 是navigation包的一个插件。
- 机器人导航过程中,会按照周围环境、实时障碍物做调整不断规划调整路径,向底层发布指令,步骤五和六是一个多次的过程,并非一次就结束了。
Cartographer 3D 导航 launch配置示例
<!-- 定位模块 -->
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find autolabor_navigation_launch)/params/cartographer
-configuration_basename third_generation_location.lua
-load_state_filename $(find autolabor_navigation_launch)/map/map_3d.pbstream"
output="screen">
<remap from="points2" to="rslidar_points" />
</node>
<node pkg="map_server" type="map_server" name="map_server" args="$(find autolabor_navigation_launch)/map/map_3d.yaml" />
<node pkg="cartographer_initialpose" type="cartographer_initialpose" name="cartographer_initialpose" >
<param name="configuration_directory" value="$(find autolabor_navigation_launch)/params/cartographer" />
<param name="configuration_basename" value="third_generation_location.lua" />
</node>
<!-- 导航模块 -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find autolabor_navigation_launch)/params/navigation/move_base/navigation_move_base.yaml" command="load" />
<rosparam file="$(find autolabor_navigation_launch)/params/navigation/costmap/3d_global_costmap_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find autolabor_navigation_launch)/params/navigation/costmap/3d_local_costmap_params.yaml" command="load" ns="local_costmap"/>
<rosparam file="$(find autolabor_navigation_launch)/params/navigation/global_planer/global_planner_params.yaml" command="load" ns="GlobalPlanner"/>
<rosparam file="$(find autolabor_navigation_launch)/params/navigation/local_planer/navigation_teb_local_planner_params.yaml" command="load" ns="TebLocalPlannerROS"/>
<param name="TebLocalPlannerROS/xy_goal_tolerance" value="0.2" />
<param name="TebLocalPlannerROS/yaw_goal_tolerance" value="0.5" />
</node>