3.0 KiB
3.0 KiB
云台相机快速上手指南
1. 编译与安装
依赖项:
安装image_proc包,用于矫正图像。
sudo apt-get install ros-noetic-image-proc
步骤:
-
打开终端并导航到你的 ROS 工作空间目录:
cd ~/catkin_ws -
下载以下三个包到
src目录下:cv_camera:用于图像获取和标定数据。pantilt_camera_serial:用于云台串口驱动,控制云台转动。rviz_pantilt_plugin:云台控制的 RViz 可视化插件。
-
进入
src目录后,使用以下命令编译工作空间:catkin_make如果你使用的是
catkin_tools,则可以使用:catkin build -
Source 你的工作空间:
source ~/catkin_ws/devel/setup.bash
2. 配置摄像头路径和串口路径
步骤:
-
找到你的摄像头设备路径和云台串口路径:
ls /dev/v4l/by-pathls /dev/ttyUSB* -
修改
pantiltcamera.launch文件中的device_path和port_name参数:device_path:摄像头设备路径,如/dev/video0。port_name:云台控制的串口路径,如/dev/ttyUSB0。
-
确保当前用户有设备操作权限,使用以下命令添加权限:
sudo usermod -a -G dialout $USER sudo chmod a+rw /dev/ttyUSB0 sudo chmod a+rw /dev/video0
3. 启动Launch文件
roslaunch pantilt_camera_serial pantiltcamera.launch
这将启动云台控制节点,允许你通过话题或服务控制云台的转动。
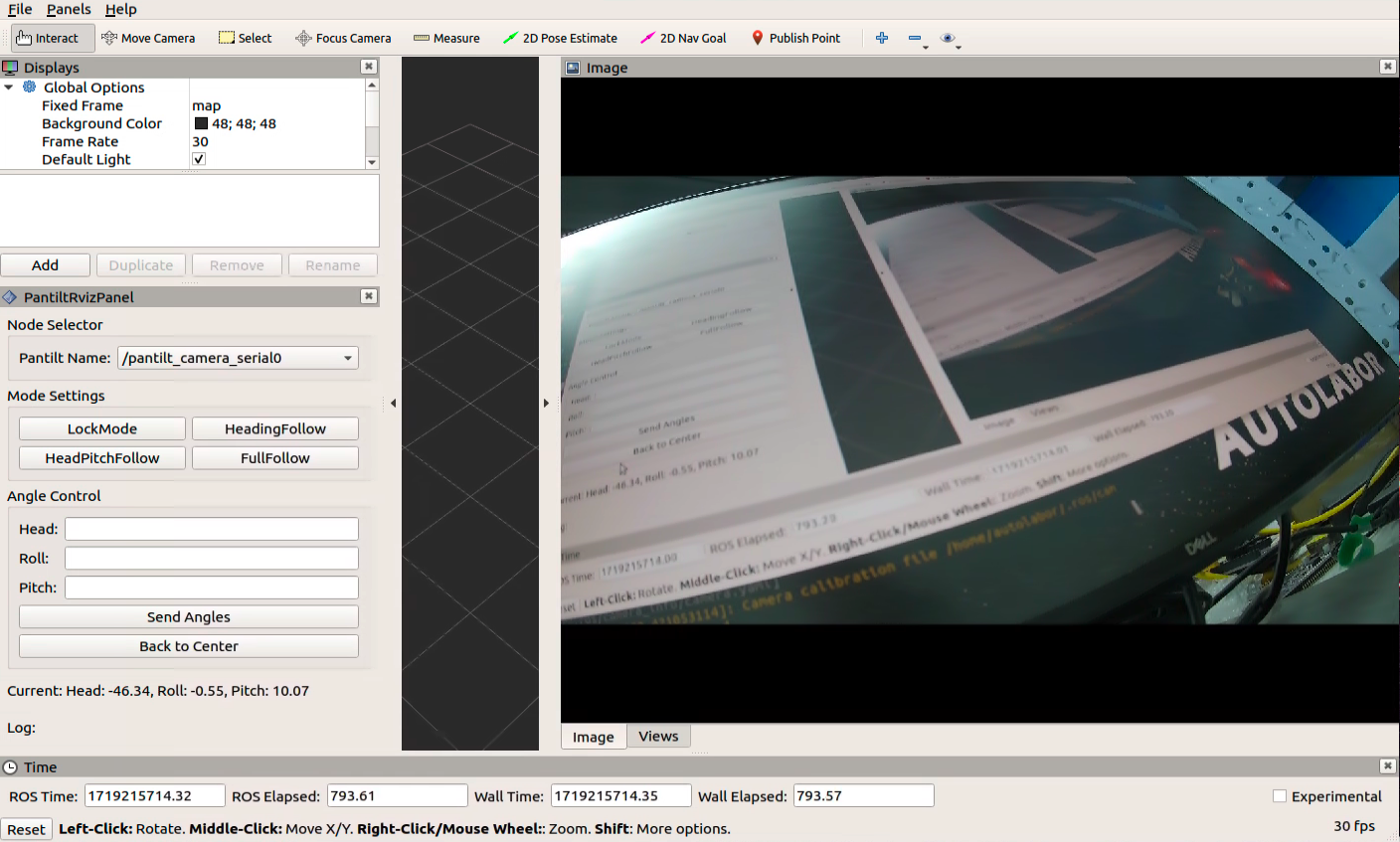
在 RViz 中,你可以通过插件界面实时控制云台,并查看摄像头的图像变化。
4. ROS节点说明
节点功能:
- cv_camera:用于图像捕获和发布标定数据,提供矫正前后的图像。
- pantilt_camera_serial:通过串口控制云台的转动,发布当前的云台角度,并响应来自其他节点的控制命令。
- rviz_pantilt_plugin:提供 RViz 可视化控制界面,允许用户通过图形界面控制云台,并查看实时图像。
话题和服务:
-
cv_camera节点:
- 发布话题:
/cv_camera/image_raw:发布原始图像。/cv_camera/camera_info:发布相机的标定信息。
- 发布话题:
-
pantilt_camera_serial节点:
- 发布话题:
/pantilt_camera_serial/pantilt_angle_info:发布当前的云台角度信息。
- 订阅话题:
/pantilt_camera_serial/pantilt_vel:接收并执行云台速度控制指令。
- 提供服务:
/pantilt_camera_serial/send_command:允许用户发送控制命令,如设置云台角度、速度等。
- 发布话题:
-
rviz_pantilt_plugin节点:
- 提供一个交互式界面,通过 RViz 可视化控制云台角度,并显示实时图像。
按照这些步骤操作,你可以快速上手并有效控制你的云台相机系统。