2.7 KiB
2.7 KiB
Autolabor云台相机使用说明
简介
PantiltRvizPanel 是为 ROS rviz
环境开发的一个插件,旨在提供一个交互式的用户界面,用于控制和监视一个可调节的摄像头平台。此插件允许用户通过图形界面发送命令,控制摄像头的方向和行为,以及接收和显示摄像头的当前角度信息。
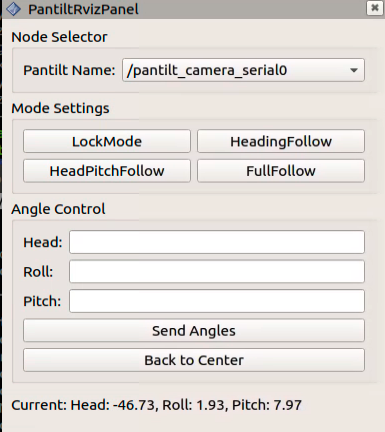
功能
- 节点选择:用户可以从下拉列表中选择当前活动的摄像头节点。
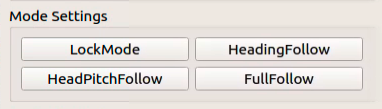
- 模式设置:用户可以设置摄像头的工作模式,包括锁定模式、跟随头部模式、跟随头部和俯仰模式及全跟随模式。
- 键盘控制:用户可以使用键盘的 W、S、A、D 键来控制摄像头的上下左右移动。
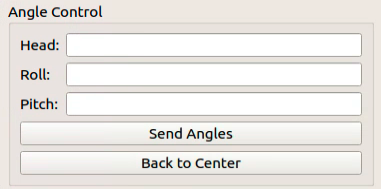
- 角度设置:用户可以输入具体的角度值,直接调整摄像头的方向。
- 角度反馈:实时显示当前摄像头的角度信息。
使用方法
- 选择摄像头节点: 在节点选择器下拉菜单中选择您希望控制的摄像头节点。
- 设置工作模式:
提供四种工作模式的按钮:
- SetLockMode:锁定当前方向。
- SetHeadingFollow:摄像头跟随主体的头部方向。
- SetHeadingPitchFollow:摄像头跟随主体的头部和俯仰方向。
- SetFullFollowMode:摄像头全方位跟随主体。
- 键盘控制:
-
在使用键盘控制时,要将单击PantiltRvizPanel窗口,使其获得焦点,然后按下键盘上的相应按键。
W或Up键:摄像头向上。S或Down键:摄像头向下。A或Left键:摄像头向左。D或Right键:摄像头向右。
- 角度设置:
- 在界面提供的文本框中输入希望设置的角度值,单位是度,然后点击发送角度按钮。
- Heading方向的取值范围是:[-160, 160]
- Roll方向的取值范围是:[-40, 40]
- Pitch方向的取值范围是:[-90, 90]
注意:此处的角度都是相对于摄像头的初始位置而言的,初始位置是固定的。
- 角度反馈: 界面将实时显示摄像头当前的角度信息。

注意:此处的角度都是相对于摄像头的初始位置而言的,初始位置是固定的。
安装
确保您的 ROS 环境已安装 rviz,并将此插件编译后加载到 rviz 中。
依赖
此插件依赖于 ROS 的通信机制和 rviz 的插件架构。确保您的系统中已正确安装 ROS 和 rviz。