4.6 KiB
4.6 KiB
pantilt_camera_serial
简介
Pantilt_camera_serial节点是一个为 ROS 开发的包,用于控制和管理与相机云台相关的硬件接口。该节点允许用户通过 ROS 控制云台的方向和角度,同时通过摄像头捕获视频数据。
功能
- 控制云台的方向和角度。
- 从摄像头捕获视频。
- 提供视频流和云台控制的 ROS 话题和服务。
使用方法
1. 编译和安装
确保已安装 pantilt_camera_serial, cv_camera, 和 rviz_pantilt_plugin 包。首先,将这些包克隆到你的 ROS
工作空间的 src 目录下,然后使用以下命令编译:
cd ~/catkin_ws # 或你的工作空间目录
catkin_make # 或使用 catkin build,如果你使用 catkin_tools
2. 修改 launch 文件
在 pantiltcamera.launch 文件中,修改 device_path 和 port_name 参数:
device_path:视频设备的路径,如/dev/v4l/by-path/pci-...port_name:云台控制的串口路径,如/dev/ttyUSB0
3. 添加设备操作权限
为了让 ROS 节点能够访问硬件设备,你可能需要为当前用户添加设备操作权限:
sudo usermod -a -G dialout $USER
sudo chmod a+rw /dev/ttyUSB0 # 云台控制的串口
sudo chmod a+rw /dev/video0 # 摄像头设备
4. 启动 launch 文件
使用以下命令启动系统:
roslaunch pantilt_camera_serial pantiltcamera.launch
5. 订阅和发布话题
此节点与其他 ROS 节点交互主要通过以下话题:
发布话题
- /node_name/pantilt_angle_info
- 类型:
pantilt_camera_serial/PantiltAngleInfo - 描述: 发布云台当前的角度信息,包括对地航向角、横滚角和俯仰角,以及对应的相对基座读数。
- 单位:角度单位均为度(degrees)。
- 消息结构:
heading: 对地航向角(degrees)roll: 对地横滚角(degrees)pitch: 对地俯仰角(degrees)encoder_heading: 相对基座航向角读数encoder_roll: 相对基座横滚角读数encoder_pitch: 相对基座俯仰角读数
- 类型:
订阅话题
- /node_name/pantilt_vel
- 类型:
geometry_msgs/Twist - 描述: 接收控制云台的速度和方向的指令。
linear.x和angular.z分别用于控制航向(heading)和俯仰(pitch)轴的速度。 - 消息用法:
linear.x: 控制航向轴的速度,取值范围 [0,2]angular.z: 控制俯仰轴的速度,取值范围 [0,2]
- 类型:
示例
发送云台控制命令示例:
rostopic pub /pantilt_camera_serial/pantilt_vel geometry_msgs/Twist '{linear: {x: 0.5}, angular: {z: 0.3}}'
6. 服务节点
提供服务 /node_name/send_command,允许用户发送具体的控制命令到云台。
- SetLockMode
- 描述:锁定当前云台的方向,使其不随输入改变。
- SetHeadingFollow
- 描述:设置云台仅跟随航向(水平方向),俯仰方向(垂直方向)保持锁定。
- SetHeadingPitchFollow
- 描述:设置云台跟随航向和俯仰方向,即云台将根据输入完全动态调整。
- SetFullFollowMode
- 描述:云台将完全跟随输入的方向移动,包括水平和垂直方向的全方位跟随。
- BackToCenter
- 描述:命令云台回到中心位置,即所有方向重置为初始状态。
- SetPantiltSpeed
- 描述:设置云台的运动速度,适用于需要控制运动快慢的场景。
- SetPantiltAngle
- 描述:直接设置云台的目标角度,参数为三个角度值:Head角度、Roll角度和Pitch角度(如果有)。
- 需要添加参数,data[0]: Head角度,data[1]: Roll角度,data[2]: Pitch角度。
- 取值范围分别为:Head角度[-160,160],Roll角度[-40,40],Pitch角度[-90,90]。
- 使用示例
rosservice call /pantilt_camera_serial/send_command "{command_name: 'SetLockMode', data: []}"
rosservice call /pantilt_camera_serial/send_command "{command_name: 'SetPantiltAngle', data: [10.0,0.0,0.0]}"
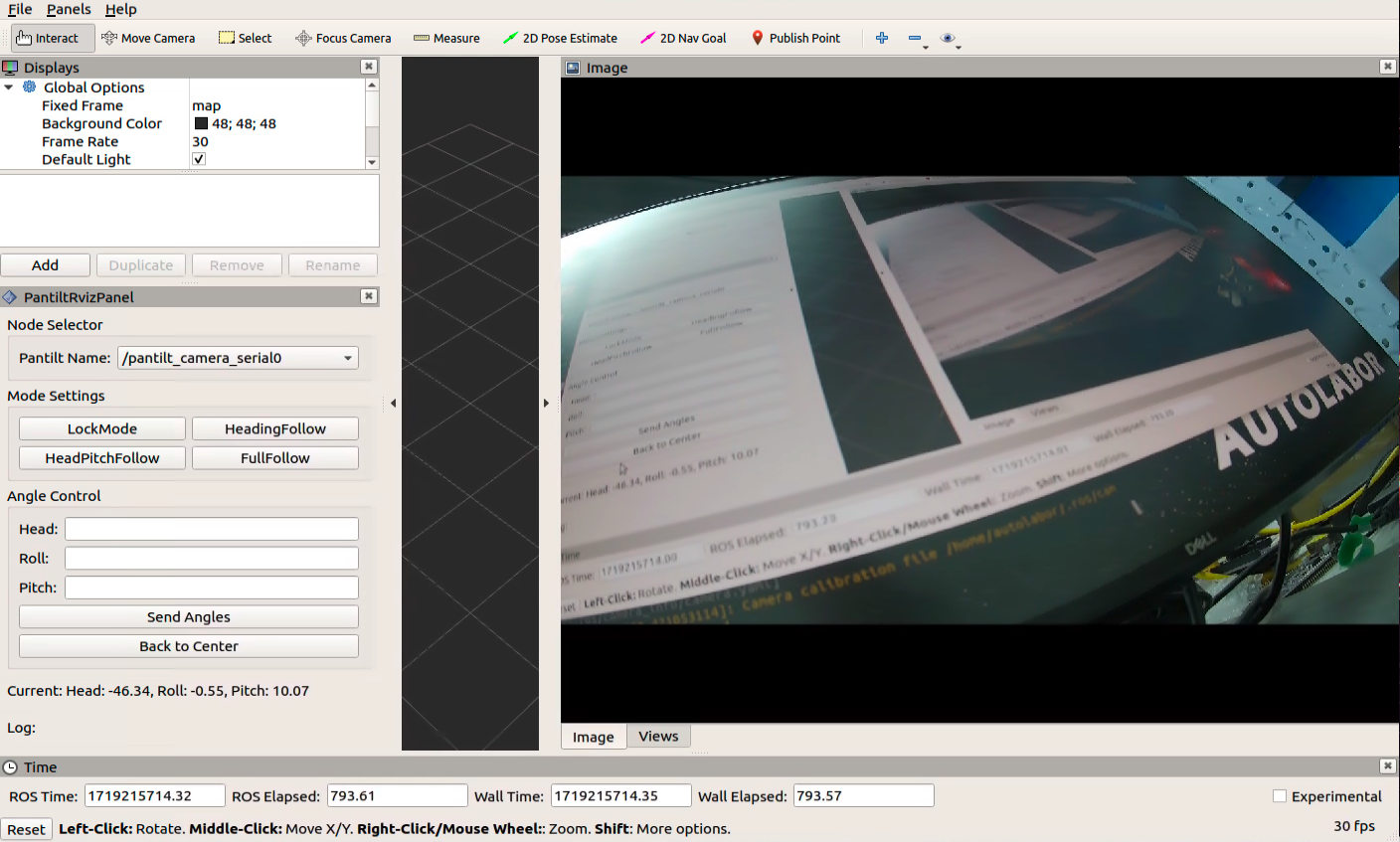
7. 使用 rviz_pantilt_plugins
在 RViz 中加载 rviz_pantilt_plugin 来实时查看和控制云台及摄像头。确保在 RViz 配置中加载了正确的 .rviz
配置文件,以查看相应的视图和控制界面。
注意
在使用之前,请确保所有硬件设备都已正确连接,并且系统上已正确安装了所有依赖的 ROS 包和库。