1.2 KiB
1.2 KiB
2D double integrator
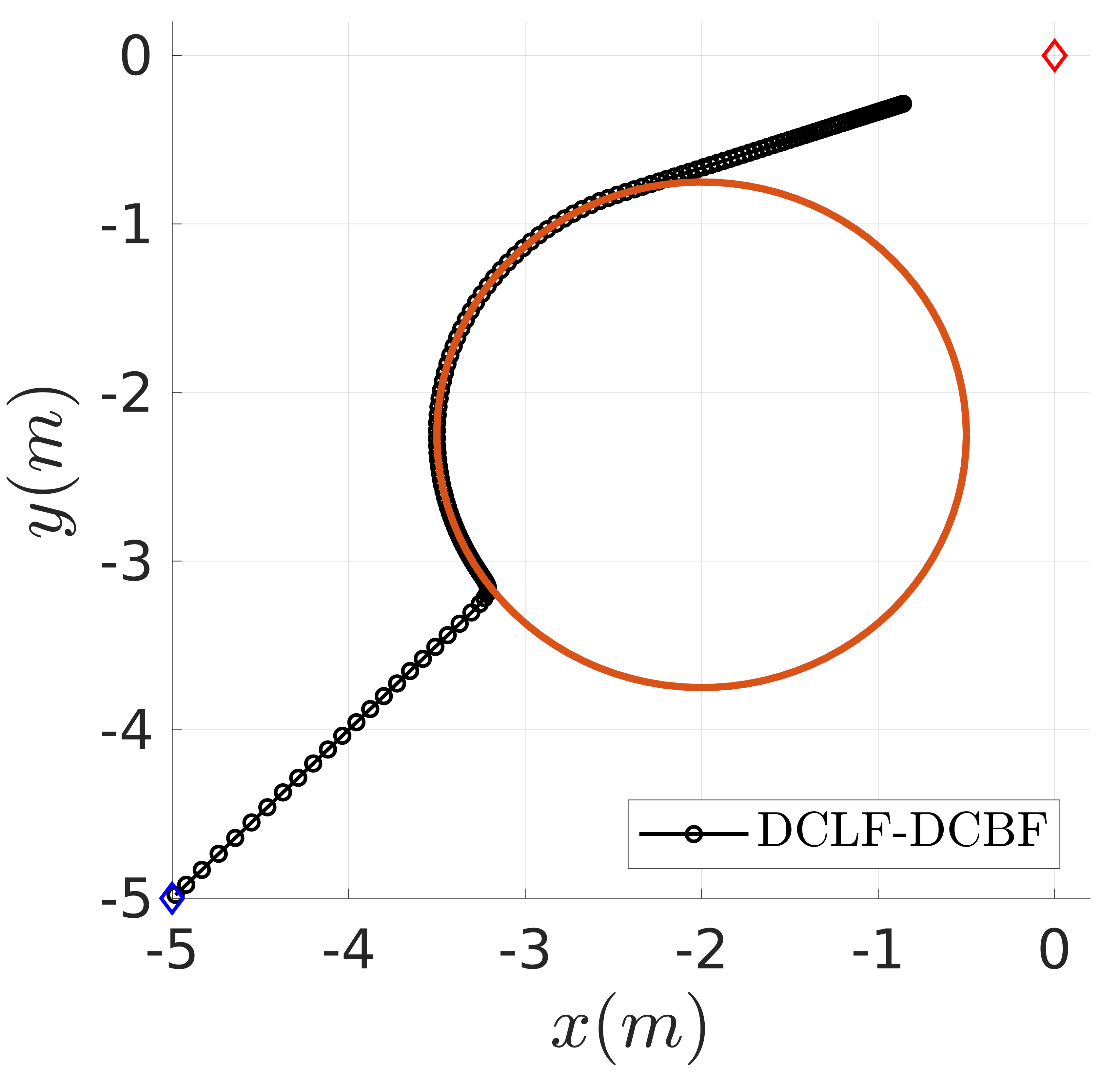
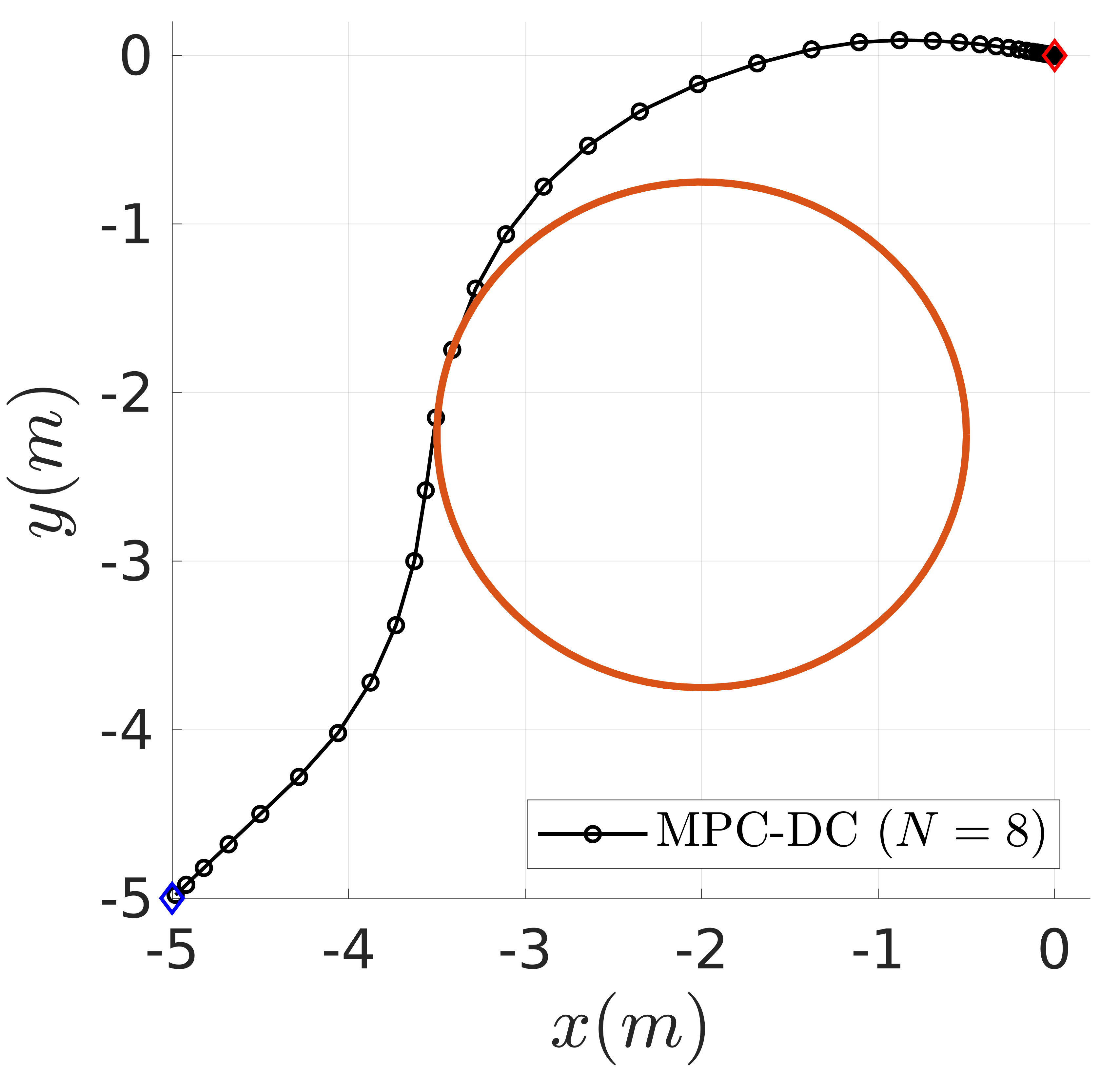
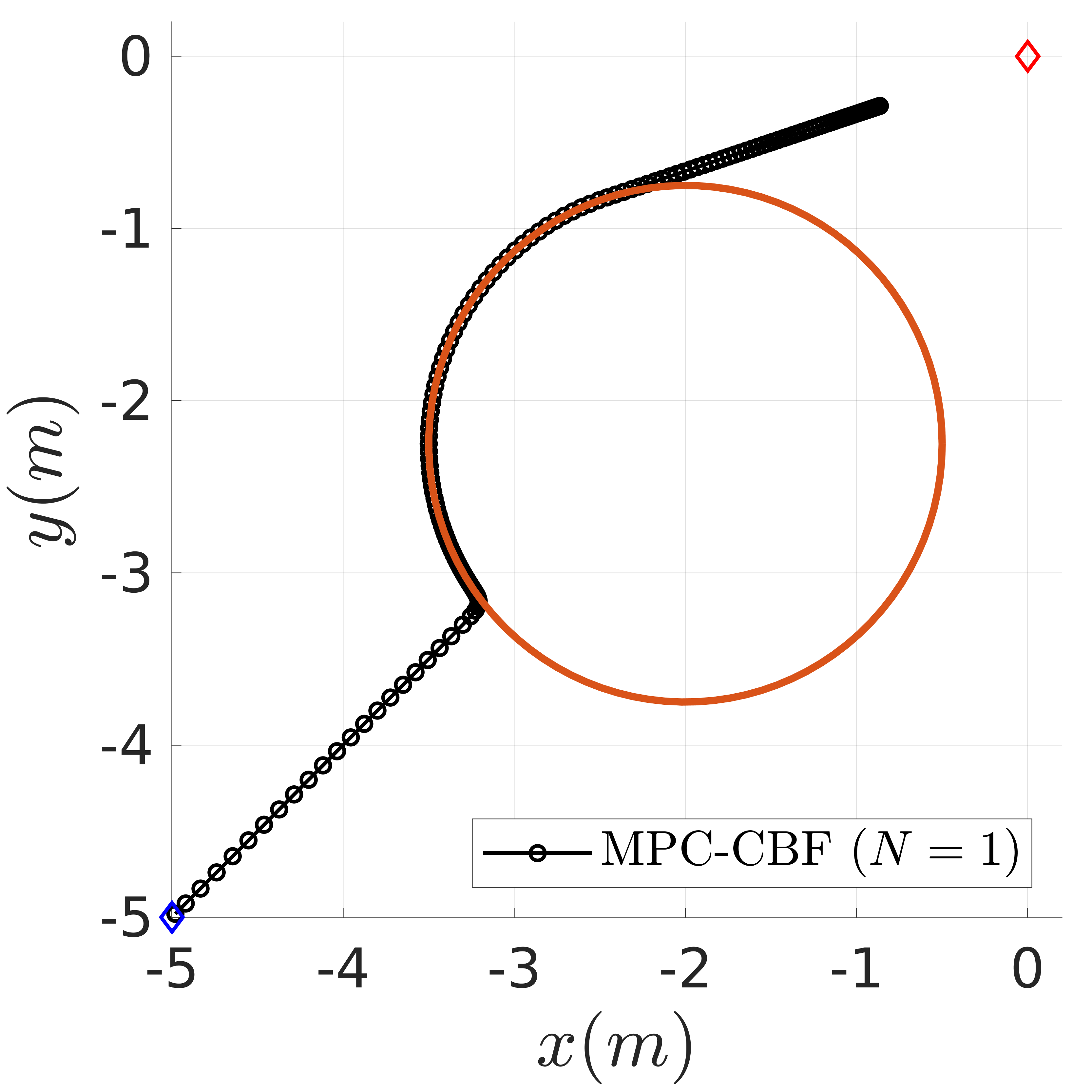
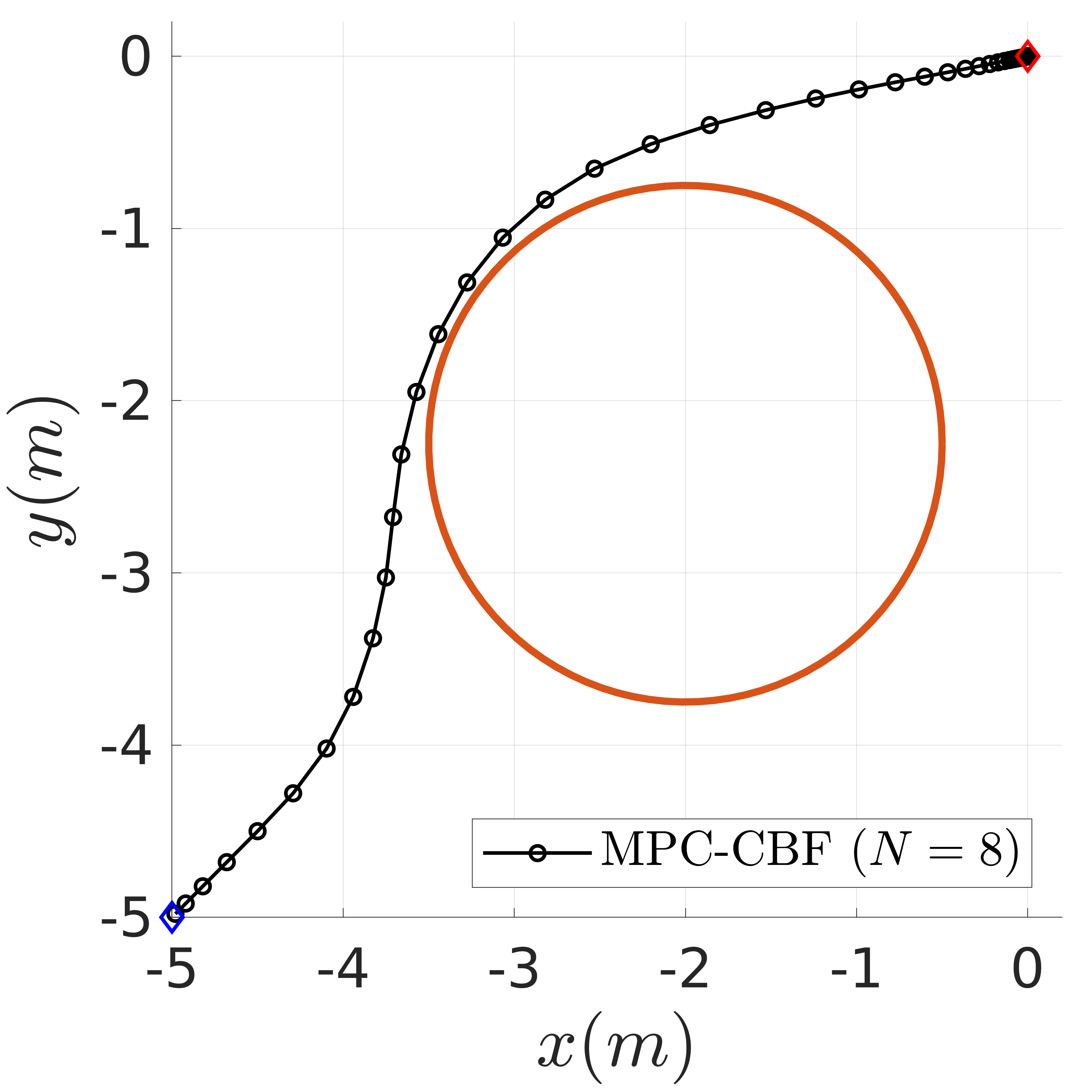
The 2D double integrator is assigned to reach the target position at origin while avoiding obstacles. We have three classes for different controllers: DCLF_DCBF.m (DCLF-DCBF), MPC_CBF.m (MPC-CBF) and MPC_DC (MPC-DC), respectively.
Moreover, to illustrate the performance among them, we have:
main.m: Run DCLF-DCBF/MPC-CBF/MPC-DC respectively.analysis_gamma.m: Run analysis for different hyperparameter\gamma.analysis_horizon.m: Run analysis for different horizon.
We illustrate the performance between DCLF-DCBF/MPC-DC/MPC-CBF
| DCLF-DCBF | MPC-DC (N=8) |
|---|---|
 |
 |
| MPC-CBF (N=1) | MPC-CBF (N=8) |
|---|---|
 |
 |
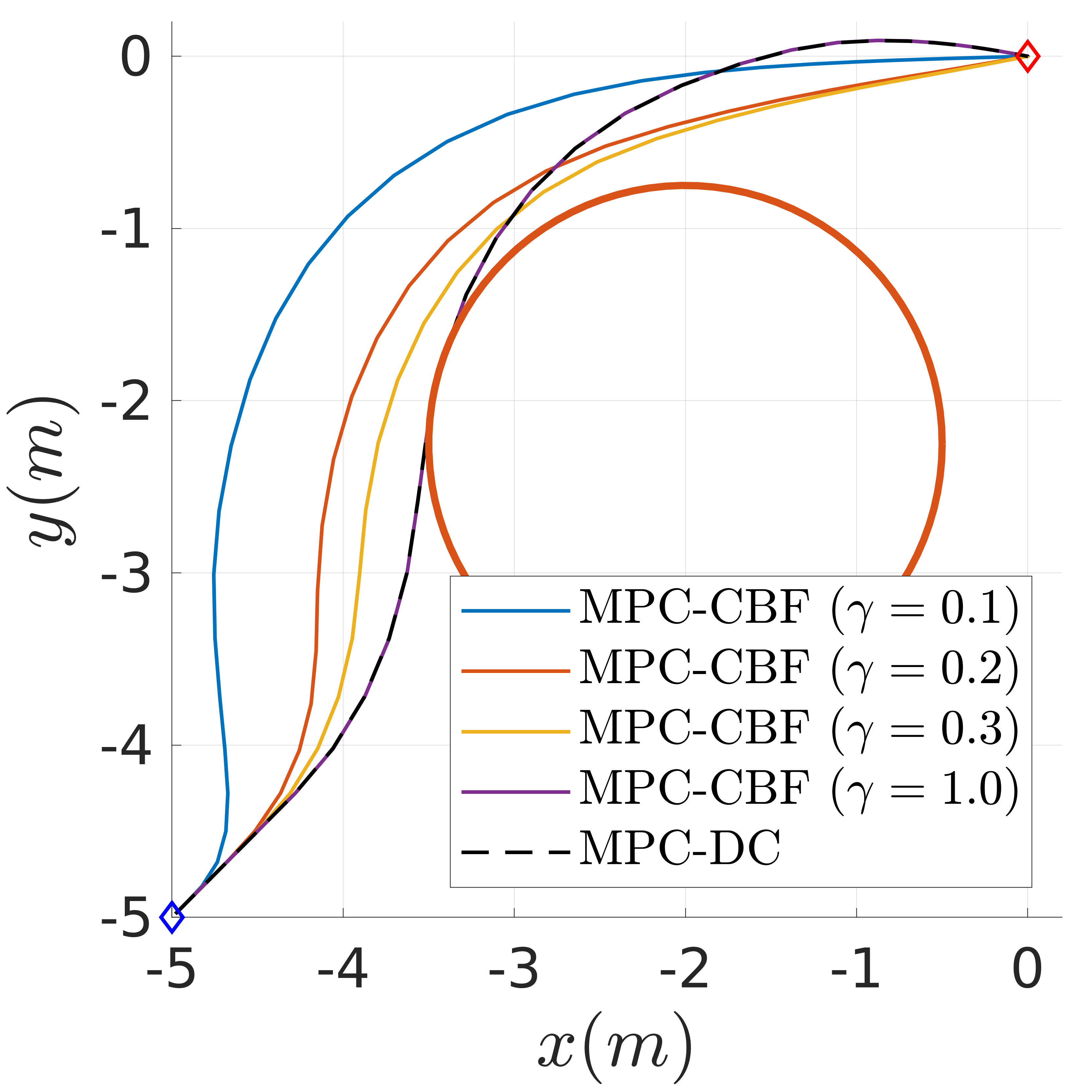
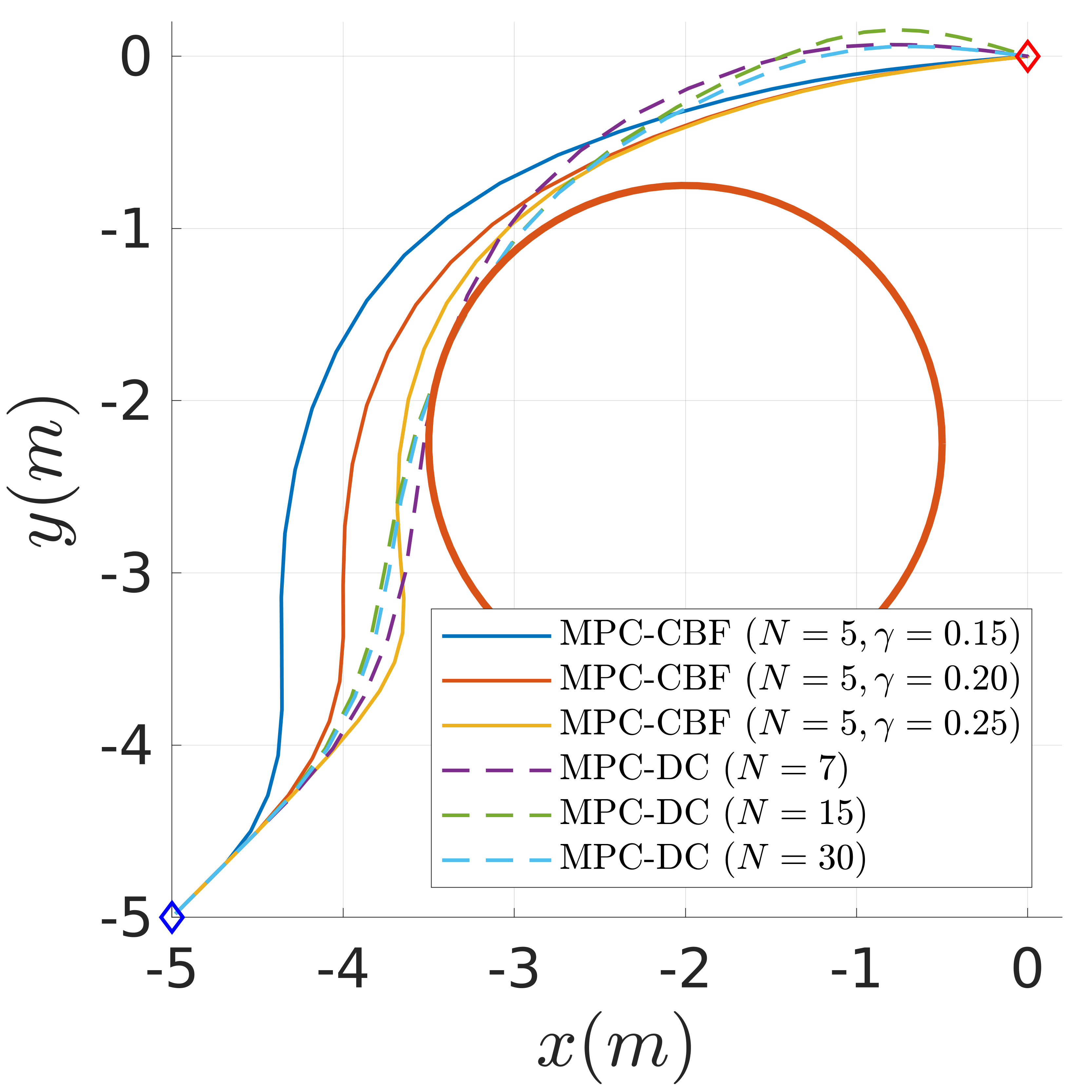
and also the safety performance for different numbers of horizon and hyperparameters
| Different hyperparameter | Different horizon |
|---|---|
 |
 |