# 启动Kinect ROS驱动
步骤:
1.进入工作空间,打开终端执行
`cd catkin_ws`
2.配置环境变量,在终端执行
`source devel/setup.bash`
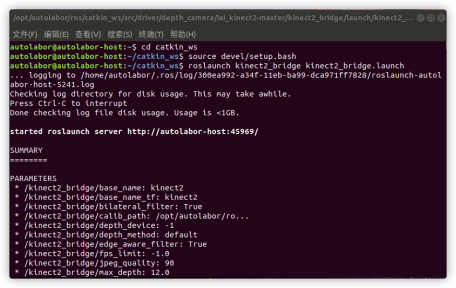
3.启动驱动,在终端执行
`roslaunch kinect2_bridge kinect2_bridge.launch`
# 查看Kinect RGB图像
前提:启动Kinect ROS驱动
步骤:
1.进入工作空间,打开终端执行
`cd catkin_ws`
2.配置环境变量,在终端执行
`source devel/setup.bash`
3.在终端执行命令:
`rosrun image_view image_view image:=/kinect2/sd/image_color`
# 查看Kinect 深度图像
前提:启动Kinect ROS驱动
步骤:
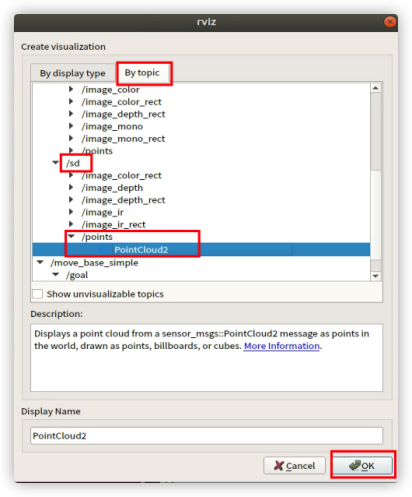
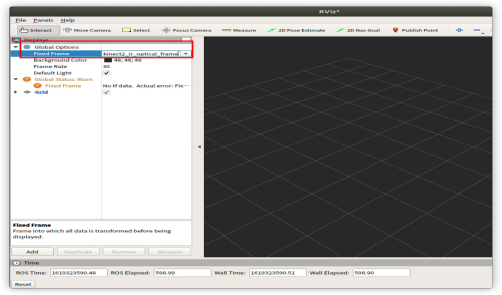
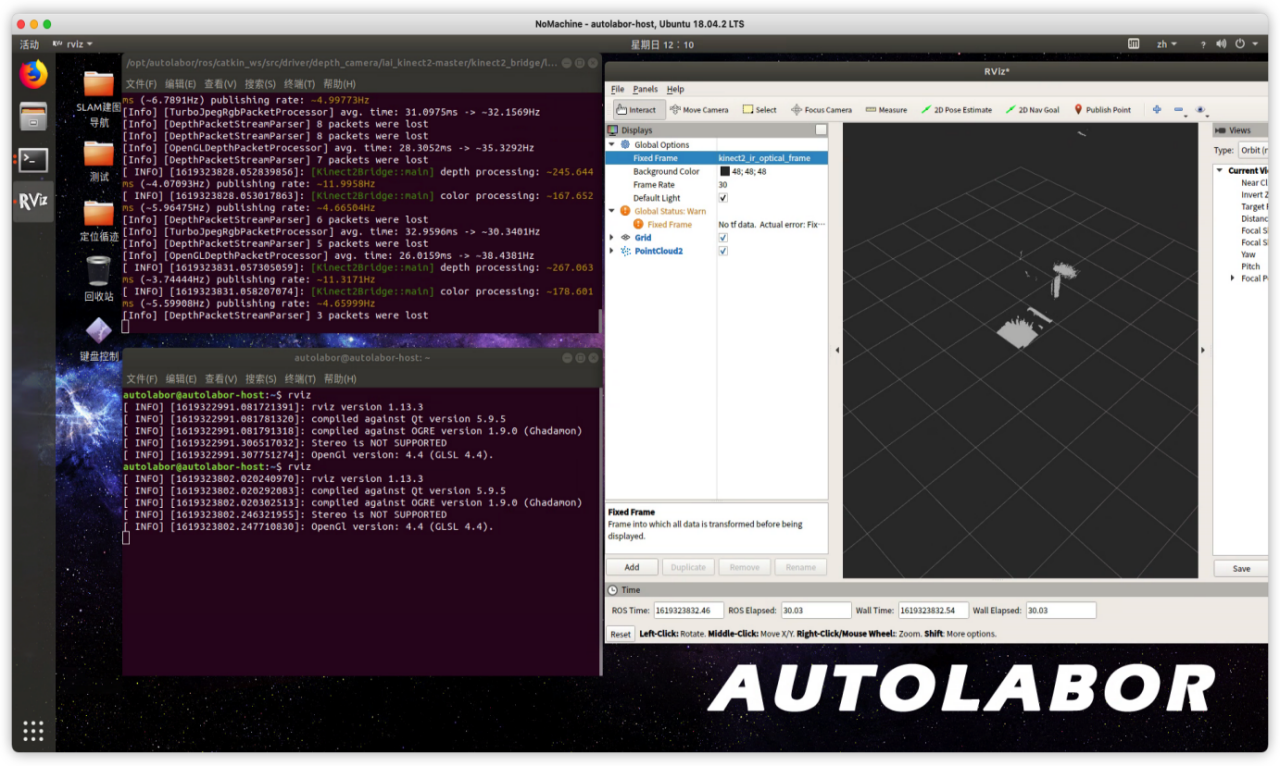
1.打开终端,输入rviz后弹出rviz窗口,点击窗口左下角【add】
2.点击弹窗中【by topic】- 打开【/kinect2/sd/points】- 选择PointCloud2 -【ok】
3.复制【kinect2_ir_optical_frame】到Global options->Fixed Frame,替换【map】
# 在建图/导航/循迹中打开摄像头(查看周围环境)
以建图为例:
步骤:
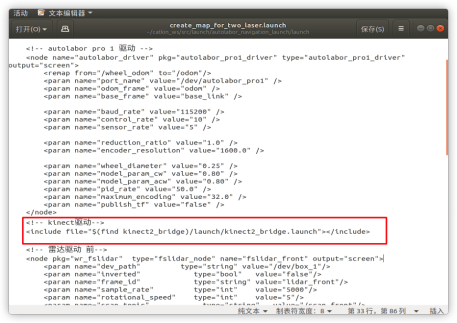
1.在建图launch文件里引入深度相机的驱动启动,保存
2.启动建图
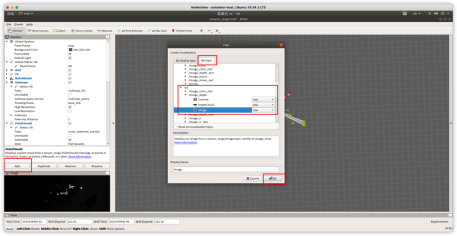
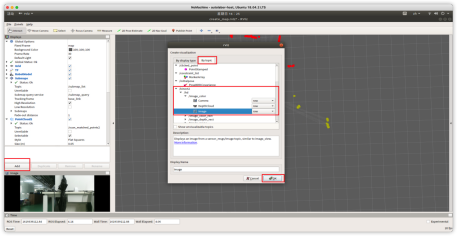
rviz里新起一个话题
方法:点击左下角【add】,选择【topic】,选择【/kinect2/hd/image_color】,下拉下来选最后一个,然后ctrl+s保存
# 在建图/导航/循迹中显示深度数据
步骤:
以建图为例:
1.将kinect驱动加载到建图launch文件中(方法同上)
2.rviz里新起一个话题
点击左下角【add】,选择【topic】,选择【/kinect2/sd/image_depth】,下拉下来选最后一个,然后ctrl+s保存