## 常见问题 - 定位巡迹
### 定位标签
1. Dashboard 软件打开报错
2. Dashboard 无法唤醒对应id的标签
3. 唤醒标签后,标签会自动关闭吗
4. 设备插上电脑后,电脑无法识别
5. 路由连接电脑,Dashboard 软件打开后,无法找到路由 Not found modem connection to computer through USB.
## 巡迹
1. 录制轨迹保存的路径,是怎么存储的?存储在哪里?
2. 轨迹是否可以保存多个,如何选择不同的轨迹进行巡迹任务?
3. 如何调整机器人在巡迹时的速度
***
## 定位巡迹-定位标签篇
1. Dashboard 软件打开报错
Dashboard 软件由硬件方提供,在不同系统中兼容性有差异,经我方测试稳定性排名: Window XP > Window 7 > Window 10
推荐使用 WIN7/XP环境。
在 Window 10下有一定几率会出现错误弹窗(见下图),如出现该弹窗,点击abort,多次执行直至正常。
***
2. Dashboard 无法唤醒对应id的标签
1. 请检查标签电源是否打开
2. 如标签距离路由过近,请稍微拿远后再次操作
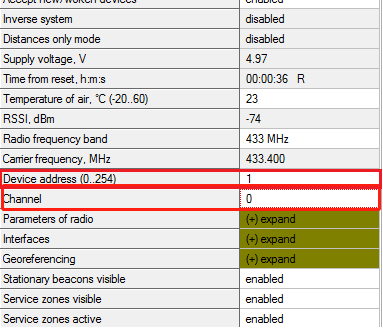
3. 如已通电,且有一定距离,仍无法唤醒,请将标签连接到电脑上,使用 Dashboard 进行检查(如下图)
Channel:是否为 0,如不是则修改
Device address:是否与标签上贴的数字一致,如不是则修改
***
3. 唤醒标签后,标签会自动关闭吗
当路由通电工作时不会,当路由断电1min后,所有标签会休眠。
***
4. 设备插上电脑后,电脑无法识别
定位路由或定位标签(必须要打开电源),插上电脑会自动安装驱动,在设备管理器-端口中,能看到对应设备。
如插上后显示不能识别,端口下无设备,请检查数据线是否插紧,确定插紧后仍未识别:
尝试手动安装驱动,[驱动下载地址](https://marvelmind.com/pics/stm32_vcp.zip)。
如手动安装后仍未能识别,请取2个设备,标签/路由,2根数据线,进行交叉测试。
判断是数据线,还是设备故障。
***
5. 路由连接电脑,Dashboard 软件打开后,无法找到路由 Not found modem connection to computer through USB.
请检查在设备管理器-端口中,是否有设备。
无如设备,请参见第 4 条。
***
## 定位巡迹-巡迹篇
1. 录制轨迹保存的路径,是怎么存储的?存储在哪里?
录制的轨迹,记录的是机器人在 map 坐标系中的坐标点,将这些坐标点写入到一个文本文件中,存放在
`catkin_ws/src/navigation/path_server/path_data`
巡迹程序执行巡迹的时,读取文件名称为`default_path.path`的文件。
***
2. 轨迹是否可以保存多个,如何选择不同的轨迹进行巡迹任务?
可以,像建图一样,轨迹也会有重命名备份这一操作,在路径文件夹下会存储所有录制成功的轨迹文件。
如需选择不同的路径文件,需在使用的时候对其进行重命名为`default_path.path`,程序会自动载入。
***
3. 如何调整机器人在巡迹时的速度
说明:机器人行走速度过快,会影响定位标签定位,影响巡迹效果。
修改以下文件:
`src/launch/autolabor_navigation_launch/two_laser_tracking_param/teb_local_planner_params.yaml`
```
max_vel_x: 0.2 //机器人的最大平移速度
max_vel_x_backwards: 0.2//当向后移动时,机器人的最大绝对平移速度
max_vel_theta: 0.2//机器人的最大旋转速度
```
修改为
```
max_vel_x: 0.8
max_vel_x_backwards: 0.6
max_vel_theta: 0.6
```
注:此建议参数为最高值,用户可根据实际使用情况进行调整。
***