# 定位循迹
## 目录
* 功能介绍
* 传感器介绍
* 实现原理
## 功能介绍
定位循迹是机器人循着用户提前录好的轨迹自主行走,行走过程中机器人能够自动躲避障碍物,自动规划路线,达到目标点。
定位循迹分为定位系统(固定定位标签)与车端(车载定位标签)两个模块,要求先搭建定位系统,然后控制车端完成循迹。
定位系统是使用Dashboard软件+固定定位标签部署地图,在Dashboard中可查看定位标签彼此的距离。
定位系统搭建完毕后,OS程序中可以得到车载定位标签的在环境地图中的绝对定位坐标。
车载定位标签的数据与里程计的数据融合定位,得到AP1在环境中的坐标点,控制AP1运动,边走边记录当前坐标点的位置,将这些坐标点记录为文件保存下来,得到路径文件。
在开始循迹的时候,程序加载路径文件,车载定位标签定位数据与里程计融合定位匹配路径数据,机器人按照指定路径行走。
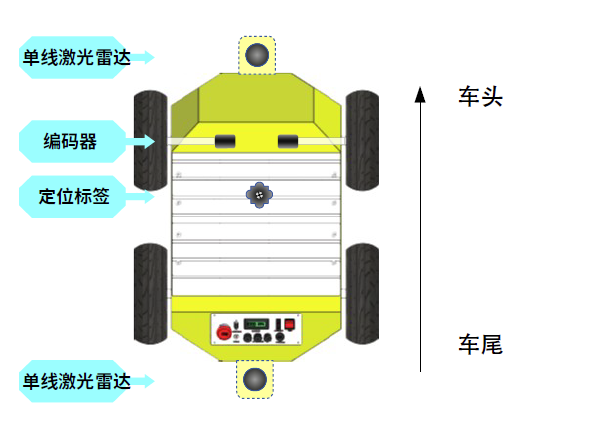
## 传感器介绍
定位循迹 用到的传感器有:
* 单线激光雷达x2,安装在AP1前后底部
* 车载定位标签,安装在AP1顶板上
* 固定定位标签,部署在循迹环境中
* 编码器/轮速里程计x2,安装在车体内部前侧
## 实现原理
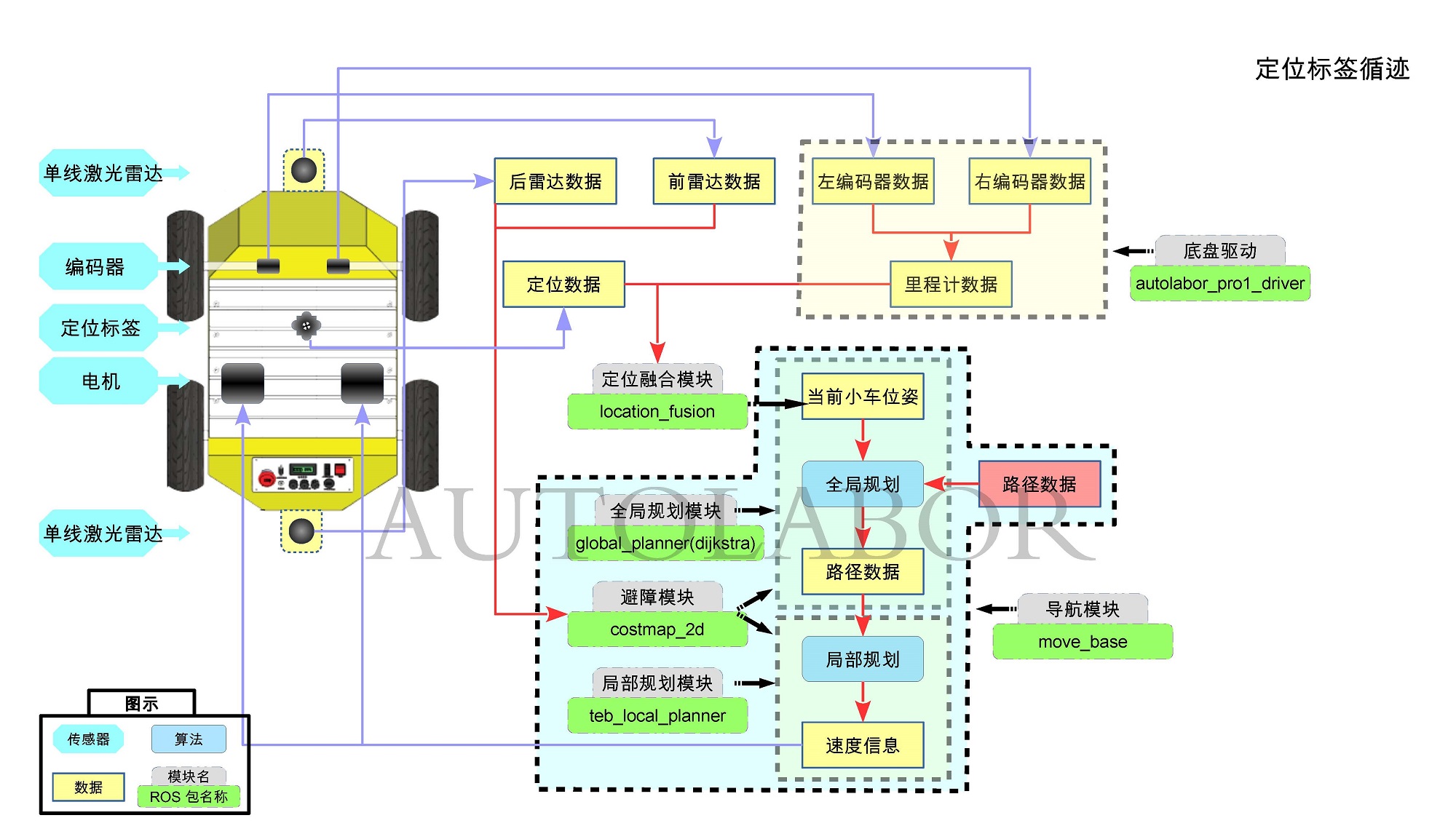
| 步骤 | 输入数据 | 操作 | 输出数据 | 使用ROS包 |
|--|--|--|--|--|
|1 | | Dashboard部署定位地图 | 定位数据(车载定位标签坐标)| marvelmind驱动包(catkin_ws\src\driver\location\marvelmind)|
|2 | 里程计数据 定位数据 | 定位融合| 当前机器人在环境中的位姿 | location_fusion(catkin_ws\src\navigation\location_fusion)|
|3| 当前机器人位姿| 控制机器人运动,录制路径| 路径数据 |path_server(catkin_ws\src\navigation\path_server)|
|4| 路径数据| 读取录制的路径数据,执行循迹操作 | 目标机器人位姿 |path_server(catkin_ws\src\navigation\path_server) [move_base](http://wiki.ros.org/move_base/)|
|5| 当前机器人位姿 目标机器人位姿| 根据机器人当前位姿,进行全局规划路线| 路径数据(初步预估导航路线) |[global_planner(dijkstra) ](http://wiki.ros.org/global_planner)|
|6| 路径数据 前雷达数据 后雷达数据 | 根据规划路径开始导航,进行过程中随着实际环境、障碍物变化,进行局部路径规划,实时避障| 局部路径规划 避障 |[costmap_2d ](http://wiki.ros.org/cost_map)[teb_local_planner](http://wiki.ros.org/teb_local_planner)|
|7| 速度信息 /cmd_vel | 向底发送速度命令 | |[move_base](http://wiki.ros.org/move_base/)|
定位循迹 launch配置示例
```
```