Added README
parent
81a4062edd
commit
95742baccc
|
|
@ -37,13 +37,9 @@ typedef ManifoldPreintegration PreintegrationType;
|
|||
|
||||
/*
|
||||
* If you are using the factor, please cite:
|
||||
* L. Carlone, Z. Kira, C. Beall, V. Indelman, F. Dellaert, "Eliminating
|
||||
* conditionally independent sets in factor graphs: a unifying perspective based
|
||||
* on smart factors", Int. Conf. on Robotics and Automation (ICRA), 2014.
|
||||
*
|
||||
* C. Forster, L. Carlone, F. Dellaert, D. Scaramuzza, "IMU Preintegration on
|
||||
* Manifold for Efficient Visual-Inertial Maximum-a-Posteriori Estimation",
|
||||
* Robotics: Science and Systems (RSS), 2015.
|
||||
* Christian Forster, Luca Carlone, Frank Dellaert, and Davide Scaramuzza,
|
||||
* "On-Manifold Preintegration for Real-Time Visual-Inertial Odometry", IEEE
|
||||
* Transactions on Robotics, 2017.
|
||||
*
|
||||
* REFERENCES:
|
||||
* [1] G.S. Chirikjian, "Stochastic Models, Information Theory, and Lie Groups",
|
||||
|
|
@ -54,8 +50,8 @@ typedef ManifoldPreintegration PreintegrationType;
|
|||
* [3] L. Carlone, S. Williams, R. Roberts, "Preintegrated IMU factor:
|
||||
* Computation of the Jacobian Matrices", Tech. Report, 2013.
|
||||
* Available in this repo as "PreintegratedIMUJacobians.pdf".
|
||||
* [4] C. Forster, L. Carlone, F. Dellaert, D. Scaramuzza, "IMU Preintegration on
|
||||
* Manifold for Efficient Visual-Inertial Maximum-a-Posteriori Estimation",
|
||||
* [4] C. Forster, L. Carlone, F. Dellaert, D. Scaramuzza, "IMU Preintegration
|
||||
* on Manifold for Efficient Visual-Inertial Maximum-a-Posteriori Estimation",
|
||||
* Robotics: Science and Systems (RSS), 2015.
|
||||
*/
|
||||
|
||||
|
|
|
|||
|
|
@ -0,0 +1,42 @@
|
|||
# Navigation Factors
|
||||
|
||||
This directory contains factors related to navigation, including various IMU factors.
|
||||
|
||||
## IMU Factor:
|
||||
|
||||
|
||||
|
||||
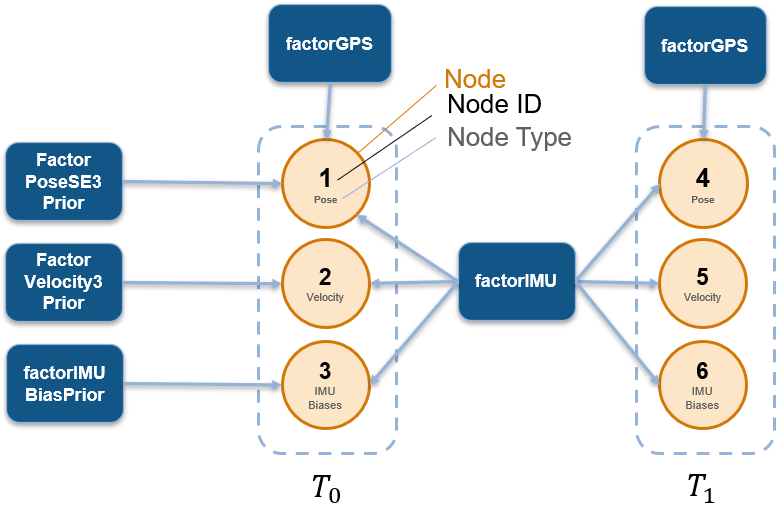
The `ImuFactor` is a 5-ways factor involving previous state (pose and velocity of
|
||||
the vehicle at previous time step), current state (pose and velocity at
|
||||
current time step), and the bias estimate.
|
||||
Following the preintegration
|
||||
scheme proposed in [2], the `ImuFactor` includes many IMU measurements, which
|
||||
are "summarized" using the PreintegratedIMUMeasurements class.
|
||||
The figure above, courtesy of [Mathworks' navigation toolbox](https://www.mathworks.com/help/nav/index.html), which are also using our work, shows the factor graph fragment for two time slices.
|
||||
|
||||
Note that this factor does not model "temporal consistency" of the biases
|
||||
(which are usually slowly varying quantities), which is up to the caller.
|
||||
See also `CombinedImuFactor` for a class that does this for you.
|
||||
|
||||
If you are using the factor, please cite:
|
||||
> Christian Forster, Luca Carlone, Frank Dellaert, and Davide Scaramuzza, "On-Manifold Preintegration for Real-Time Visual-Inertial Odometry", IEEE Transactions on Robotics, 2017.
|
||||
|
||||
## REFERENCES:
|
||||
1. G.S. Chirikjian, "Stochastic Models, Information Theory, and Lie Groups",
|
||||
Volume 2, 2008.
|
||||
2. T. Lupton and S.Sukkarieh, "Visual-Inertial-Aided Navigation for
|
||||
High-Dynamic Motion in Built Environments Without Initial Conditions",
|
||||
TRO, 28(1):61-76, 2012.
|
||||
3. L. Carlone, S. Williams, R. Roberts, "Preintegrated IMU factor:
|
||||
Computation of the Jacobian Matrices", Tech. Report, 2013.
|
||||
Available in this repo as "PreintegratedIMUJacobians.pdf".
|
||||
4. C. Forster, L. Carlone, F. Dellaert, D. Scaramuzza, "IMU Preintegration on
|
||||
Manifold for Efficient Visual-Inertial Maximum-a-Posteriori Estimation",
|
||||
Robotics: Science and Systems (RSS), 2015.
|
||||
|
||||
## The Attitude Factor
|
||||
|
||||
The `AttitudeFactor` in GTSAM is a factor that constrains the orientation (attitude) of a robot or sensor platform based on directional measurements. Both `Rot3` and `Pose3` versions are available.
|
||||
|
||||
Written up in detail with the help of ChatGPT [here](AttitudeFactor.md).
|
||||
|
||||
Loading…
Reference in New Issue