 Files: Can be downloaded from [google drive](https://drive.google.com/drive/folders/1CGYEJ9-wWjr8INyan6q1BZz_5VtGB-fP?usp=sharing)
Run:
```
roslaunch fast_lio mapping_avia.launch
rosbag play YOUR_DOWNLOADED.bag
```
### 4.2 Velodyne HDL-32E Rosbag
**NCLT Dataset**: Original bin file can be found [here](http://robots.engin.umich.edu/nclt/).
We produce [Rosbag Files](https://drive.google.com/drive/folders/1blQJuAB4S80NwZmpM6oALyHWvBljPSOE?usp=sharing) and [a python script](https://drive.google.com/file/d/1QC9IRBv2_-cgo_AEvL62E1ml1IL9ht6J/view?usp=sharing) to generate Rosbag files: ```python3 sensordata_to_rosbag_fastlio.py bin_file_dir bag_name.bag```
Run:
```
roslaunch fast_lio mapping_velodyne.launch
rosbag play YOUR_DOWNLOADED.bag
```
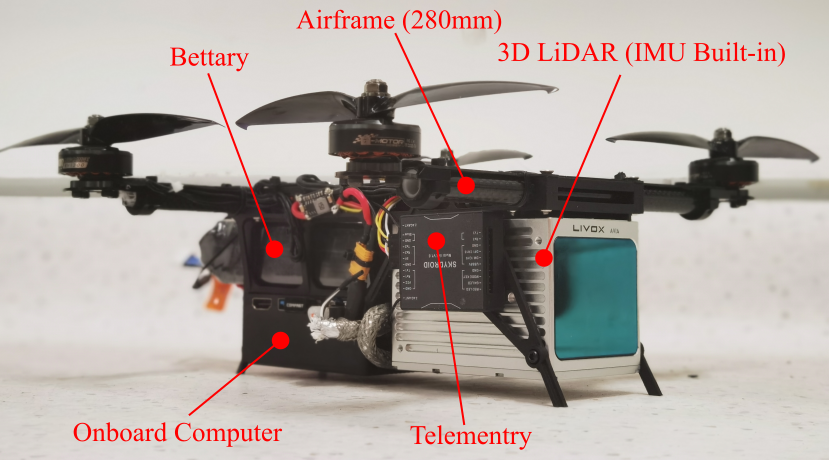
## 5.Implementation on UAV
In order to validate the robustness and computational efficiency of FAST-LIO in actual mobile robots, we build a small-scale quadrotor which can carry a Livox Avia LiDAR with 70 degree FoV and a DJI Manifold 2-C onboard computer with a 1.8 GHz Intel i7-8550U CPU and 8 G RAM, as shown in below.
The main structure of this UAV is 3d printed (Aluminum or PLA), the .stl file will be open-sourced in the future.
Files: Can be downloaded from [google drive](https://drive.google.com/drive/folders/1CGYEJ9-wWjr8INyan6q1BZz_5VtGB-fP?usp=sharing)
Run:
```
roslaunch fast_lio mapping_avia.launch
rosbag play YOUR_DOWNLOADED.bag
```
### 4.2 Velodyne HDL-32E Rosbag
**NCLT Dataset**: Original bin file can be found [here](http://robots.engin.umich.edu/nclt/).
We produce [Rosbag Files](https://drive.google.com/drive/folders/1blQJuAB4S80NwZmpM6oALyHWvBljPSOE?usp=sharing) and [a python script](https://drive.google.com/file/d/1QC9IRBv2_-cgo_AEvL62E1ml1IL9ht6J/view?usp=sharing) to generate Rosbag files: ```python3 sensordata_to_rosbag_fastlio.py bin_file_dir bag_name.bag```
Run:
```
roslaunch fast_lio mapping_velodyne.launch
rosbag play YOUR_DOWNLOADED.bag
```
## 5.Implementation on UAV
In order to validate the robustness and computational efficiency of FAST-LIO in actual mobile robots, we build a small-scale quadrotor which can carry a Livox Avia LiDAR with 70 degree FoV and a DJI Manifold 2-C onboard computer with a 1.8 GHz Intel i7-8550U CPU and 8 G RAM, as shown in below.
The main structure of this UAV is 3d printed (Aluminum or PLA), the .stl file will be open-sourced in the future.